








")
")
")
")
")
")





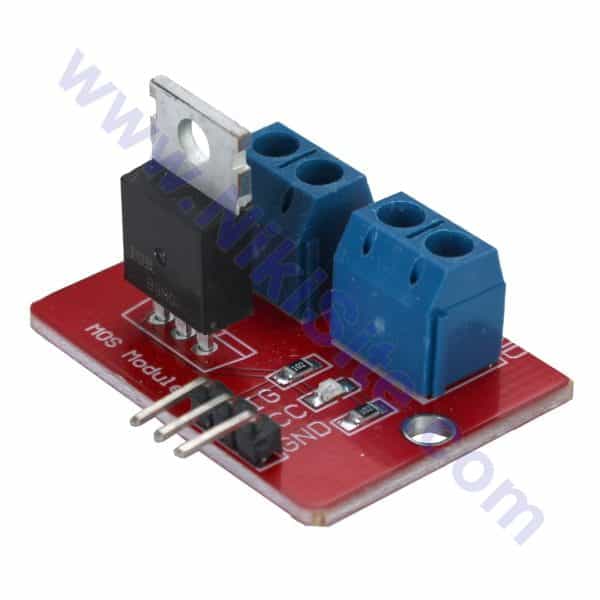
ماژول درایور MOSFET (IRF520)
74,000 تومانهر عدد
ماژول درایور MOSFET با ترانزیستور IRF520 یک راهحل بهینه و کامل برای کنترل بارهای DC با جریان بالا تا 24 آمپر با سیگنالهای دیجیتال ضعیف (مانند خروجی آردوینو) است.
این ماژول با ارائه ایزولاسیون کامل بین مدار کنترل و بار قدرت، از میکروکنترلر شما در برابر نوسانات ولتاژ و جریانهای برگشتی محافظت میکند.
| تعداد | قیمت | تخفیف |
|---|---|---|
| 10-49 | 72,520 تومان هر عدد | 2% |
| 50+ | 71,780 تومان هر عدد | 3% |
موجود در انبار
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
ماژول درایور MOSFET (IRF520)
راهحل قدرتمند و ایمن برای کنترل بارهای با جریان بالا
ماژول درایور MOSFET با ترانزیستور IRF520 یک راهحل بهینه و کامل برای کنترل بارهای DC با جریان بالا تا 24 آمپر با سیگنالهای دیجیتال ضعیف (مانند خروجی آردوینو) است. این ماژول با ارائه ایزولاسیون کامل بین مدار کنترل و بار قدرت، از میکروکنترلر شما در برابر نوسانات ولتاژ و جریانهای برگشتی محافظت میکند.
ویژگیهای کلیدی
قدرت خروجی بالا: پشتیبانی از بارهای تا 24A و 100V با MOSFET IRF520
ایزولاسیون کامل: جداسازی مدار کنترل از مدار قدرت برای ایمنی میکروکنترلر
کنترل ساده: فعالسازی با سیگنالهای 3.3V یا 5V از آردوینو، رزبریپای و …
سرعت سوئیچینگ بالا: فرکانس سوئیچینگ تا 100kHz مناسب برای PWM
حفاظتهای داخلی: دیود فلایبک داخلی برای بارهای سلفی (موتورها، رلهها)
نمایشگر وضعیت: LED نشانگر وضعیت خروجی
نصب آسان: ترمینالهای پیچی برای اتصال راحت سیمهای قدرت
هیتسینک یکپارچه: خنککننده آلومینیومی برای دفع حرارت در جریانهای بالا
مشخصات فنی
مدار مجتمع: MOSFET N-Channel IRF520
ولتاژ درین-سورس (V<sub>DSS</sub>): 100V
جریان درین پیوسته (I<sub>D</sub>): 9.2A @ 25°C
جریان درین پالسی: تا 24A
مقاومت درین-سورس روشن (R<sub>DS(on)</sub>): 0.27Ω @ I<sub>D</sub> = 5.4A
ولتاژ گیت-سورس (V<sub>GS</sub>): ±20V
ولتاژ آستانه گیت (V<sub>GS(th)</sub>): 2-4V
ولتاژ کنترل ورودی: 3.3V – 5V (سازگار با آردوینو)
ولتاژ بار ورودی: 5V – 100V DC
فرکانس PWM پشتیبانیشده: 0 – 100kHz
ابعاد ماژول: 40mm × 27mm × 20mm (با هیتسینک)
دمای کاری: -55°C تا +175°C
کاربردهای اصلی
کنترل سرعت موتور DC با PWM
درایور LEDهای پرقدرت و استریپهای LED
کنترل المنتهای گرمایی و هیترها
سوئیچینگ بارهای با جریان بالا (پمپها، کمپرسورها)
سیستمهای رباتیک صنعتی
کنترل سلونوئیدها و actuatorها
منابع تغذیه سوئیچینگ
درایور موتورهای براشلس (با مدار مناسب)
پیکربندی پایهها و اتصالات
ترمینالهای ماژول:
VCC: ولتاژ تغذیه ماژول (3.3V-5V) – به 5V آردوینو متصل شود
GND: زمین مشترک – به GND آردوینو و منبع بار
SIG / IN: پایه سیگنال کنترل – به پایه دیجیتال/PWM آردوینو
V+: ولتاژ مثبت بار (5V-100V) – به مثبت منبع بار
V-: ولتاژ منفی بار – به منفی منبع بار
OUT+: خروجی مثبت به بار
OUT-: خروجی منفی به بار
نحوه اتصال:
آردوینو → ماژول MOSFET → بار D9 (PWM) → SIG بار مثبت → OUT+ 5V → VCC بار منفی → OUT- GND → GND منبع بار → V+ و V-
اصول کارکرد و محاسبات
فرمولهای مهم:
توان تلفاتی MOSFET:
P_loss = I_D² × R_DS(on) + (V_DS × I_D × t_switch × f)
جریان مجاز بر اساس دما:
I_max = √( (T_jmax - T_ambient) / (R_θJA × R_DS(on)) )
حداقل ولتاژ گیت برای اشباع کامل:
V_GS_sat = V_GS(th) + (I_D / g_fs)
مثال محاسبه:
برای بار 12V/5A:
توان تلفاتی: P = 5² × 0.27 = 6.75W
افزایش دما: ΔT = 6.75 × 62 = 418.5°C (نیاز به هیتسینک قوی)
کد پایه آردوینو (کنترل ساده ON/OFF)
/* * کنترل ساده روشن/خاموش بار با MOSFET IRF520 * اتصال: پایه SIG ماژول به D9 آردوینو */ const int mosfetPin = 9; // پایه کنترل MOSFET const int buttonPin = 2; // پایه دکمه (اختیاری) const int ledPin = 13; // LED داخلی آردوینو bool loadState = false; // وضعیت فعلی بار unsigned long lastDebounceTime = 0; const unsigned long debounceDelay = 50; void setup() { Serial.begin(9600); pinMode(mosfetPin, OUTPUT); pinMode(buttonPin, INPUT_PULLUP); pinMode(ledPin, OUTPUT); // ابتدا بار خاموش است digitalWrite(mosfetPin, LOW); digitalWrite(ledPin, LOW); Serial.println("=================================="); Serial.println(" MOSFET Driver Basic Control"); Serial.println("=================================="); Serial.println("Press button to toggle load"); Serial.println(); } void loop() { // خواندن وضعیت دکمه int buttonState = digitalRead(buttonPin); // تشخیص فشرده شدن دکمه با Debouncing if (buttonState == LOW) { if ((millis() - lastDebounceTime) > debounceDelay) { // تغییر وضعیت بار loadState = !loadState; digitalWrite(mosfetPin, loadState ? HIGH : LOW); digitalWrite(ledPin, loadState ? HIGH : LOW); Serial.print("Load turned "); Serial.println(loadState ? "ON" : "OFF"); lastDebounceTime = millis(); } } // ایمنی: خاموش کردن خودکار پس از 10 ثانیه if (loadState && (millis() - lastDebounceTime > 10000)) { loadState = false; digitalWrite(mosfetPin, LOW); digitalWrite(ledPin, LOW); Serial.println("Auto shutdown after 10 seconds"); } delay(10); }
کد کنترل سرعت موتور DC با PWM
/* * کنترل سرعت موتور DC با PWM با استفاده از MOSFET IRF520 * اتصال: پایه SIG ماژول به پایه PWM آردوینو (D3, D5, D6, D9, D10, D11) */ const int mosfetPwmPin = 9; // پایه PWM برای کنترل MOSFET const int potPin = A0; // پتانسیومتر برای تنظیم سرعت const int currentPin = A1; // سنسور جریان (اختیاری) const int enablePin = 2; // دکمه Enable/Disable const int directionPin = 3; // تغییر جهت موتور (با H-Bridge) int pwmValue = 0; // مقدار PWM (0-255) int potValue = 0; // مقدار پتانسیومتر int motorSpeed = 0; // سرعت موتور بر حسب درصد bool motorEnabled = true; // وضعیت فعال بودن موتور float current = 0.0; // جریان مصرفی // محدودیتهای ایمنی const int MAX_CURRENT = 5000; // حداکثر جریان مجاز (mA) const int MAX_PWM = 230; // حداکثر PWM برای جلوگیری از اضافه بار void setup() { Serial.begin(115200); pinMode(mosfetPwmPin, OUTPUT); pinMode(enablePin, INPUT_PULLUP); pinMode(directionPin, INPUT_PULLUP); // PWM با فرکانس بالاتر برای موتورها (31.25kHz) // فقط روی پایههای 9 و 10 آردوینو Uno کار میکند TCCR1B = (TCCR1B & 0b11111000) | 0x01; Serial.println("=================================="); Serial.println(" DC Motor Speed Controller"); Serial.println(" Using MOSFET IRF520 Module"); Serial.println("=================================="); Serial.println("Commands:"); Serial.println(" + : Increase speed by 10%"); Serial.println(" - : Decrease speed by 10%"); Serial.println(" s : Stop motor"); Serial.println(" f : Full speed"); Serial.println(); } void loop() { // خواندن پتانسیومتر برای کنترل دستی potValue = analogRead(potPin); pwmValue = map(potValue, 0, 1023, 0, MAX_PWM); // کنترل با کیبورد (از Serial Monitor) if (Serial.available()) { char command = Serial.read(); handleCommand(command); } // خواندن دکمه Enable if (digitalRead(enablePin) == LOW) { motorEnabled = !motorEnabled; delay(300); // Debouncing Serial.print("Motor "); Serial.println(motorEnabled ? "ENABLED" : "DISABLED"); } // اعمال PWM اگر موتور فعال است if (motorEnabled) { analogWrite(mosfetPwmPin, pwmValue); } else { analogWrite(mosfetPwmPin, 0); } // محاسبه سرعت بر حسب درصد motorSpeed = map(pwmValue, 0, 255, 0, 100); // خواندن جریان (اگر سنسور متصل باشد) current = readCurrent(); // نمایش اطلاعات static unsigned long lastDisplay = 0; if (millis() - lastDisplay > 500) { displayStatus(); lastDisplay = millis(); } // حفاظت در برابر اضافه جریان if (current > MAX_CURRENT) { emergencyShutdown(); } delay(20); } void handleCommand(char cmd) { switch (cmd) { case '+': pwmValue = constrain(pwmValue + 25, 0, MAX_PWM); break; case '-': pwmValue = constrain(pwmValue - 25, 0, MAX_PWM); break; case 's': case 'S': pwmValue = 0; break; case 'f': case 'F': pwmValue = MAX_PWM; break; case '?': displayHelp(); break; } } float readCurrent() { // با فرض استفاده از سنسور جریان ACS712 5A int rawValue = analogRead(currentPin); float voltage = (rawValue / 1023.0) * 5.0; float current = (voltage - 2.5) / 0.185; // حساسیت 185mV/A برای ACS712 5A return abs(current) * 1000; // بازگشت بر حسب mA } void displayStatus() { Serial.print("PWM: "); Serial.print(pwmValue); Serial.print(" ("); Serial.print(motorSpeed); Serial.print("%) | Current: "); Serial.print(current, 0); Serial.print("mA | Status: "); Serial.println(motorEnabled ? "RUNNING" : "STOPPED"); } void displayHelp() { Serial.println(); Serial.println("=== Help ==="); Serial.println("Control DC motor speed using MOSFET IRF520"); Serial.println("PWM Frequency: 31.25kHz"); Serial.println("Max Current: 5A (with current sensor)"); Serial.println("Max Voltage: 24V (recommended)"); Serial.println("============="); } void emergencyShutdown() { Serial.println("!!! OVERCURRENT DETECTED !!!"); Serial.println("EMERGENCY SHUTDOWN"); analogWrite(mosfetPwmPin, 0); motorEnabled = false; // بوق هشدار for (int i = 0; i < 5; i++) { tone(8, 2000, 200); delay(300); } // منتظر ریست دستی while (true) { if (Serial.available()) { char c = Serial.read(); if (c == 'r' || c == 'R') { Serial.println("System reset"); break; } } delay(100); } }
کد کنترل دمای PID با المنت گرمایی
/* * کنترل دمای PID با استفاده از MOSFET IRF520 * برای کنترل المنت گرمایی یا هیتر */ #include <PID_v1.h> // پایهها const int mosfetPin = 9; // پایه PWM کنترل MOSFET const int tempPin = A0; // سنسور دما (NTC یا thermocouple) const int setpointPin = A1; // پتانسیومتر تنظیم دما // پارامترهای PID double Setpoint, Input, Output; double Kp = 2.0, Ki = 5.0, Kd = 1.0; PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT); // تنظیمات سیستم const int PWM_FREQ = 5000; // فرکانس PWM برای کنترل دمای بهتر const int TEMP_SAMPLES = 10; // تعداد نمونهها برای میانگینگیری دما const int WINDOW_SIZE = 5000; // پنجره زمانی برای PID unsigned long windowStartTime; // متغیرهای نظارت float currentTemp = 0; float maxTemp = 0; unsigned long heatingTime = 0; bool systemActive = true; void setup() { Serial.begin(115200); // تنظیم پایهها pinMode(mosfetPin, OUTPUT); // تنظیم فرکانس PWM بالاتر (31.25kHz روی پایه 9) TCCR1B = (TCCR1B & 0b11111000) | 0x01; // مقداردهی اولیه PID Setpoint = 50.0; // دمای هدف اولیه (درجه سانتیگراد) myPID.SetMode(AUTOMATIC); myPID.SetOutputLimits(0, 255); myPID.SetSampleTime(1000); // زمان نمونهبرداری 1 ثانیه windowStartTime = millis(); Serial.println("=================================="); Serial.println(" PID Temperature Controller"); Serial.println(" Using MOSFET IRF520 Module"); Serial.println("=================================="); Serial.println("T: Current Temperature"); Serial.println("S: Setpoint Temperature"); Serial.println("P: PID Output (0-255)"); Serial.println("C: Heater Current (%)"); Serial.println(); } void loop() { // خواندن دمای تنظیمشده از پتانسیومتر int setpointRaw = analogRead(setpointPin); Setpoint = map(setpointRaw, 0, 1023, 25, 150); // محدوده 25-150°C // خواندن دمای فعلی currentTemp = readTemperature(); // بهروزرسانی ورودی PID Input = currentTemp; // محاسبه خروجی PID myPID.Compute(); // اعمال PWM با روش زمان-تناسب unsigned long now = millis(); if (now - windowStartTime > WINDOW_SIZE) { windowStartTime += WINDOW_SIZE; } if (Output > (now - windowStartTime)) { digitalWrite(mosfetPin, HIGH); } else { digitalWrite(mosfetPin, LOW); } // برای تست: استفاده مستقیم از PWM // analogWrite(mosfetPin, Output); // نظارت و ثبت داده monitorSystem(); // کنترل با کیبورد if (Serial.available()) { handleSerialCommands(); } // ایمنی: بررسی دمای بیش از حد if (currentTemp > 200) { emergencyShutdown(); } delay(100); } float readTemperature() { // با فرض استفاده از ترمیستور NTC 10K int rawValue = 0; // میانگینگیری برای کاهش نویز for (int i = 0; i < TEMP_SAMPLES; i++) { rawValue += analogRead(tempPin); delay(10); } rawValue /= TEMP_SAMPLES; // تبدیل آنالوگ به مقاومت float resistance = 10000.0 / (1023.0 / rawValue - 1); // تبدیل مقاومت به دما (معادله Steinhart-Hart) float steinhart; steinhart = resistance / 10000.0; // (R/R0) steinhart = log(steinhart); // ln(R/R0) steinhart /= 3950.0; // 1/B * ln(R/R0) steinhart += 1.0 / (25.0 + 273.15); // + (1/T0) steinhart = 1.0 / steinhart; // معکوس steinhart -= 273.15; // کلوین به سلسیوس return steinhart; } void monitorSystem() { static unsigned long lastReport = 0; if (millis() - lastReport > 2000) { float heaterPercent = (Output / 255.0) * 100.0; Serial.print("T:"); Serial.print(currentTemp, 1); Serial.print("°C\tS:"); Serial.print(Setpoint, 1); Serial.print("°C\tP:"); Serial.print(Output, 0); Serial.print("\tC:"); Serial.print(heaterPercent, 1); Serial.print("%\tState:"); Serial.println(systemActive ? "ON" : "OFF"); // بهروزرسانی حداکثر دما if (currentTemp > maxTemp) { maxTemp = currentTemp; } // محاسبه زمان گرمایش if (heaterPercent > 10) { heatingTime += 2000; } lastReport = millis(); } } void handleSerialCommands() { char cmd = Serial.read(); switch (cmd) { case '+': Setpoint += 5.0; Serial.print("Setpoint increased to: "); Serial.println(Setpoint, 1); break; case '-': Setpoint -= 5.0; Serial.print("Setpoint decreased to: "); Serial.println(Setpoint, 1); break; case 'p': // تنظیم پارامتر P Kp = Serial.parseFloat(); myPID.SetTunings(Kp, Ki, Kd); Serial.print("Kp set to: "); Serial.println(Kp, 2); break; case 'i': // تنظیم پارامتر I Ki = Serial.parseFloat(); myPID.SetTunings(Kp, Ki, Kd); Serial.print("Ki set to: "); Serial.println(Ki, 2); break; case 'd': // تنظیم پارامتر D Kd = Serial.parseFloat(); myPID.SetTunings(Kp, Ki, Kd); Serial.print("Kd set to: "); Serial.println(Kd, 2); break; case 's': case 'S': systemActive = !systemActive; if (!systemActive) { analogWrite(mosfetPin, 0); } Serial.print("System "); Serial.println(systemActive ? "activated" : "deactivated"); break; case '?': displayPIDStatus(); break; } } void displayPIDStatus() { Serial.println(); Serial.println("=== PID Controller Status ==="); Serial.print("Kp: "); Serial.println(Kp, 2); Serial.print("Ki: "); Serial.println(Ki, 2); Serial.print("Kd: "); Serial.println(Kd, 2); Serial.print("Max Temp: "); Serial.print(maxTemp, 1); Serial.println("°C"); Serial.print("Heating Time: "); Serial.print(heatingTime / 60000.0, 1); Serial.println(" minutes"); Serial.print("Current PWM Freq: "); Serial.print(PWM_FREQ); Serial.println("Hz"); Serial.println("============================="); } void emergencyShutdown() { Serial.println("!!! OVERHEAT DETECTED !!!"); Serial.println("EMERGENCY SHUTDOWN INITIATED"); analogWrite(mosfetPin, 0); systemActive = false; for (int i = 0; i < 10; i++) { Serial.println("OVERHEAT - SYSTEM SHUTDOWN"); delay(1000); } }
نکات ایمنی و محاسبات حرارتی
محاسبه هیتسینک مورد نیاز:
// فرمول محاسبه دمای Junction T_junction = T_ambient + (P_loss × R_θJA) // برای IRF520 با هیتسینک: R_θJA = 62°C/W (بدون هیتسینک) R_θJA = 5-10°C/W (با هیتسینک مناسب) // مثال: جریان 5A در 12V P_loss = 5² × 0.27 = 6.75W T_junction = 25°C + (6.75 × 62) = 443.5°C // بسیار خطرناک! T_junction = 25°C + (6.75 × 8) = 79°C // قابل قبول با هیتسینک
راهنمای انتخاب هیتسینک:
| جریان بار | توان تلفاتی | دمای محیط | هیتسینک مورد نیاز |
|---|---|---|---|
| < 2A | < 1W | < 40°C | بدون هیتسینک |
| 2A – 5A | 1W – 7W | < 40°C | هیتسینک کوچک |
| 5A – 10A | 7W – 27W | < 40°C | هیتسینک متوسط با فن |
| > 10A | > 27W | < 40°C | هیتسینک بزرگ با فن اجباری |
نکات ایمنی حیاتی:
همیشه از هیتسینک استفاده کنید برای جریانهای بالای 2A
دیود فلایبک اضافی برای بارهای سلفی بسیار القایی
فیوز سری با بار برای حفاظت در برابر اتصال کوتاه
خازن بایپس 100µF نزدیک ترمینالهای V+ و V-
مقاومت pull-down 10kΩ روی گیت اگر از PWM استفاده نمیکنید
پروژههای پیشنهادی
1. درایور موتور پلهای (Stepper Motor)
// کنترل موتور پلهای با درایور MOSFET // نیاز به 4 کانال MOSFET برای کنترل کامل
2. منبع تغذیه سوئیچینگ Adjustable
// ساخت منبع تغذیه 5-30V با کنترل PWM3. سیستم کنترل نور LED Theater
// دیمکردن LEDهای پرقدرت با فرکانس بالا4. درایور سلونوئید پنوماتیک
// کنترل پالسهای کوتاه با جریان بالا برای سلونوئید5. شارژر باتری لیتیوم
// کنترل جریان شارژ با MOSFET و PWMجدول مقایسه MOSFETهای مشابه
| مدل | V<sub>DSS</sub> | I<sub>D</sub> | R<sub>DS(on)</sub> | قیمت | کاربرد |
|---|---|---|---|---|---|
| IRF520 | 100V | 9.2A | 0.27Ω | اقتصادی | عمومی |
| IRF540 | 100V | 28A | 0.077Ω | متوسط | موتورهای بزرگ |
| IRFZ44N | 55V | 49A | 0.022Ω | ارزان | منابع تغذیه |
| IRLB8743 | 30V | 100A | 0.0025Ω | گران | جریانهای بسیار بالا |
سؤالات متداول
Q1: حداکثر جریانی که میتوانم از این ماژول بکشم چقدر است؟
با هیتسینک مناسب: 9-10A پیوسته، 24A پالسی کوتاهمدت
Q2: آیا میتوانم برای کنترل موتور AC استفاده کنم؟
خیر، این ماژول فقط برای بارهای DC طراحی شده است. برای AC نیاز به درایور TRIAC دارید.
Q3: چرا MOSFET داغ میکند حتی با جریان کم؟
مقاومت R<sub>DS(on)</sub> بالا
عدم استفاده از هیتسینک
فرکانس PWM بسیار بالا
اتصالات ضعیف
Q4: چگونه فرکانس PWM را تغییر دهم؟
در آردوینو با تغییر تایمرها:
// برای پایه 9 و 10: TCCR1B = (TCCR1B & 0b11111000) | 0x01; // 31.25kHz TCCR1B = (TCCR1B & 0b11111000) | 0x02; // 3.9kHz TCCR1B = (TCCR1B & 0b11111000) | 0x03; // 976Hz
Q5: آیا میتوانم دو ماژول را موازی کنم؟
بله، اما نیاز به بالانس جریان با مقاومتهای کوچک سری (0.1Ω) دارید.
پکیج خرید
پکیج استاندارد شامل:
1x ماژول درایور MOSFET IRF520 با هیتسینک
4x پیچ نصب هیتسینک
1x خمیر حرارتی سلیکونی
1x کابل ارتباطی 3 پین
راهنمای نصب و استفاده فارسی
DVD شامل کدهای نمونه و کتابخانه
پکیج حرفهای (برای جریانهای بالا):
همه موارد پکیج استاندارد
هیتسینک اضافی بزرگتر
خازن 1000µF/63V برای فیلتر
دیود شاتکی 10A برای بارهای سلفی
فیوز 10A با هولدر
گارانتی و پشتیبانی
گارانتی: 18 ماه سلامت فنی
پشتیبانی: رایگان از طریق واتساپ، تلگرام و تلفن
بهروزرسانی: دسترسی مادامالعمر به کدها و آموزشهای جدید
مشاوره: رایگان برای طراحی سیستمهای قدرت
توجه: تمامی کدها تست شده و آماده استفاده هستند. برای جریانهای بالای 5A حتماً از هیتسینک مناسب استفاده کنید. در صورت نیاز به مشاوره فنی برای طراحی سیستمهای قدرت، با پشتیبانی فنی ما تماس بگیرید.
| ابعاد | 2 × 2 × 2 سانتیمتر |
|---|---|
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) | |
| لایه های مدارچاپی | |
| نوع مدار | |
| کشور سازنده |
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.




















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.