



 ترانزیستورها
ترانزیستورها خازنها
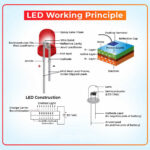
خازنها دیودها
دیودها رگولاتورها
رگولاتورها مقاومتها
مقاومتها کریستال و اسیلاتور
کریستال و اسیلاتور مدارات مجتمع
مدارات مجتمع ابزارها
ابزارها تجهیزات
تجهیزات تجهیزات لحیمکاری
تجهیزات لحیمکاری مولتیمتر و ابزار اندازهگیری
مولتیمتر و ابزار اندازهگیری منبع تغذیه و باتری
منبع تغذیه و باتری تستر
تسترماژول انکودر چرخشی
سنسور دقیق اندازهگیری موقعیت و سرعت زاویهای
🔄 انکودر چرخشی: چشم دیجیتال سیستمهای حرکتی
ماژول انکودر چرخشی یک سنسور حیاتی برای اندازهگیری دقیق موقعیت، سرعت و شتاب زاویهای در سیستمهای حرکتی است. این ماژول با تبدیل حرکت چرخشی به سیگنالهای دیجیتال، امکان کنترل دقیق موتورها و سیستمهای موقعیتیابی را فراهم میکند.
🎯 انواع انکودر چرخشی
🔍 انکودر افزایشی (Incremental):
-
خروجی پالسهای A و B: تشخیص جهت و موقعیت نسبی
-
پالس Index: نقطه مرجع مطلق در هر دور
-
رزولوشن: معمولاً 100 تا 5000 پالس بر دور (PPR)
🎯 انکودر مطلق (Absolute):
-
کدگذاری موقعیت مطلق: موقعیت دقیق حتی پس از خاموشی
-
خروجی موازی یا سریال: Gray Code, Binary, یا SSI
-
رزولوشن: تا 16 بیت (65536 موقعیت مجزا)
⚡ انکودر نوری (Optical):
-
دقت بالا: تا 0.001 درجه
-
سرعت عملیاتی: تا 10000 RPM
-
مقاوم در برابر نویز: عملکرد عالی در محیطهای صنعتی
📊 مشخصات فنی پیشرفته
پارامترهای کلیدی:
-
رزولوشن: 100 – 5000 PPR (پالس بر دور)
-
ولتاژ کاری: 3.3V – 24V DC
-
جریان مصرف: 10mA – 50mA
-
فرکانس بیشینه: 100kHz – 1MHz
-
دقت زاویهای: ±0.1° تا ±0.01°
-
سرعت بیشینه: 5000 – 10000 RPM
خروجیهای استاندارد:
-
کانال A و B: پالسهای 90 درجه فاز خارج از فاز
-
کانال Z (Index): یک پالس در هر دور کامل
-
خروجی دیفرانسیل: RS422 برای نویزگیری بهتر
-
خروجی Open Collector: سازگاری با سطوح ولتاژ مختلف
🛠 ساختار و طراحی
اجزای اصلی:
انکودر نوری:
[دیسک کدگذاری] → [فرستنده LED] → [گیرنده فوتودیود] → [مدار شرطسازی]
↓ ↓ ↓ ↓
شیارهای ریز نور مادون قرمز تشخیص نور شکلدهی پالس
کدگذاری کانالها:
// تشخیص جهت از فاز کانالهای A و B enum Direction { CLOCKWISE, // A leading B COUNTER_CLOCKWISE, // B leading A UNKNOWN }; Direction detectDirection(bool channelA, bool channelB, bool lastA, bool lastB) { if (lastA == 0 && channelA == 1) { // لبه بالارونده A return (channelB == 0) ? CLOCKWISE : COUNTER_CLOCKWISE; } if (lastB == 0 && channelB == 1) { // لبه بالارونده B return (channelA == 1) ? CLOCKWISE : COUNTER_CLOCKWISE; } return UNKNOWN; }
💻 برنامهنویسی و راهاندازی
اتصال پایه به آردوینو:
// اتصال انکودر افزایشی #define ENCODER_A 2 // پین با قابلیت وقفه #define ENCODER_B 3 // پین با قابلیت وقفه #define ENCODER_Z 4 // پین Index (اختیاری) volatile long encoderCount = 0; volatile long lastPosition = 0; unsigned long lastTime = 0; float rpm = 0.0; void setupEncoder() { Serial.begin(115200); // تنظیم پینها pinMode(ENCODER_A, INPUT_PULLUP); pinMode(ENCODER_B, INPUT_PULLUP); pinMode(ENCODER_Z, INPUT_PULLUP); // تنظیم وقفهها attachInterrupt(digitalPinToInterrupt(ENCODER_A), encoderISR, CHANGE); attachInterrupt(digitalPinToInterrupt(ENCODER_B), encoderISR, CHANGE); Serial.println("انکودر چرخشی راهاندازی شد"); } void encoderISR() { static uint8_t oldState = 0; uint8_t newState = (digitalRead(ENCODER_B) << 1) | digitalRead(ENCODER_A); // جدول حالت برای انکودر افزایشی static const int8_t transitionTable[16] = { 0, // 00 -> 00 -1, // 00 -> 01 1, // 00 -> 10 0, // 00 -> 11 1, // 01 -> 00 0, // 01 -> 01 0, // 01 -> 10 -1, // 01 -> 11 -1, // 10 -> 00 0, // 10 -> 01 0, // 10 -> 10 1, // 10 -> 11 0, // 11 -> 00 1, // 11 -> 01 -1, // 11 -> 10 0 // 11 -> 11 }; uint8_t index = (oldState << 2) | newState; encoderCount += transitionTable[index]; oldState = newState; }
کلاس مدیریت پیشرفته انکودر:
class RotaryEncoder { private: int pinA, pinB, pinZ; volatile long count; volatile long lastCount; unsigned long lastTime; float velocity; // دور بر دقیقه float position; // درجه int ppr; // پالس بر دور public: RotaryEncoder(int a, int b, int z = -1, int resolution = 1000) { pinA = a; pinB = b; pinZ = z; ppr = resolution; count = 0; velocity = 0.0; position = 0.0; pinMode(pinA, INPUT_PULLUP); pinMode(pinB, INPUT_PULLUP); if (pinZ != -1) pinMode(pinZ, INPUT_PULLUP); // وقفه با رزولوشن 4X attachInterrupt(digitalPinToInterrupt(pinA), isrA, CHANGE); attachInterrupt(digitalPinToInterrupt(pinB), isrB, CHANGE); } // ISR برای کانال A static void isrA() { static RotaryEncoder* instance = nullptr; if (!instance) return; bool a = digitalRead(instance->pinA); bool b = digitalRead(instance->pinB); if (a == b) { instance->count--; } else { instance->count++; } } // ISR برای کانال B static void isrB() { static RotaryEncoder* encoder = nullptr; if (!encoder) return; bool a = digitalRead(encoder->pinA); bool b = digitalRead(encoder->pinB); if (a == b) { encoder->count++; } else { encoder->count--; } } // محاسبه سرعت void updateVelocity() { unsigned long currentTime = micros(); if (lastTime == 0) { lastTime = currentTime; lastCount = count; return; } unsigned long deltaTime = currentTime - lastTime; long deltaCount = count - lastCount; if (deltaTime > 0) { // محاسبه RPM velocity = (deltaCount * 60000000.0) / (ppr * 4 * deltaTime); // محاسبه موقعیت در درجه position = fmod((count * 360.0) / (ppr * 4), 360.0); lastTime = currentTime; lastCount = count; } } // گرفتن موقعیت مطلق float getAbsolutePosition() { return position; } // گرفتن موقعیت نسبی (درصد) float getRelativePosition() { return fmod(position, 360.0) / 3.6; // درصد } // گرفتن RPM float getRPM() { return velocity; } // گرفتن سرعت زاویهای (rad/s) float getAngularVelocity() { return velocity * 0.10472; // RPM به rad/s } // ریست کردن شمارنده void reset() { count = 0; position = 0.0; velocity = 0.0; } // تشخیص عبور از نقطه صفر bool passedZeroPoint() { if (pinZ == -1) return false; static bool lastZ = HIGH; bool currentZ = digitalRead(pinZ); if (lastZ == HIGH && currentZ == LOW) { lastZ = currentZ; return true; } lastZ = currentZ; return false; } }; // استفاده RotaryEncoder encoder(2, 3, 4, 1000); // 1000 PPR void setup() { Serial.begin(115200); Serial.println("انکودر با رزولوشن 1000 PPR راهاندازی شد"); } void loop() { encoder.updateVelocity(); static unsigned long lastPrint = 0; if (millis() - lastPrint > 100) { lastPrint = millis(); Serial.print("موقعیت: "); Serial.print(encoder.getAbsolutePosition(), 1); Serial.print("° | RPM: "); Serial.print(encoder.getRPM(), 1); Serial.print(" | سرعت: "); Serial.print(encoder.getAngularVelocity(), 2); Serial.println(" rad/s"); if (encoder.passedZeroPoint()) { Serial.println("📍 عبور از نقطه مرجع"); } } }
⚙️ کاربردهای پیشرفته
۱. سیستم کنترل موقعیت بسته:
class PositionControlSystem { private: RotaryEncoder encoder; float targetPosition; float kp, ki, kd; float integral, lastError; public: PositionControlSystem(int a, int b, float p, float i, float d) : encoder(a, b, -1, 2000), kp(p), ki(i), kd(d) { targetPosition = 0.0; integral = 0.0; lastError = 0.0; } void setTarget(float positionDegrees) { targetPosition = fmod(positionDegrees, 360.0); Serial.print("هدف موقعیت تنظیم شد: "); Serial.print(targetPosition); Serial.println("°"); } float calculateControlOutput() { encoder.updateVelocity(); float currentPosition = encoder.getAbsolutePosition(); // محاسبه خطا float error = calculateShortestPathError(currentPosition, targetPosition); // کنترل PID integral += error; float derivative = error - lastError; float output = (kp * error) + (ki * integral) + (kd * derivative); lastError = error; // محدود کردن خروجی return constrain(output, -100.0, 100.0); } float calculateShortestPathError(float current, float target) { float error = target - current; // پیدا کردن کوتاهترین مسیر دایرهای if (error > 180.0) { error -= 360.0; } else if (error < -180.0) { error += 360.0; } return error; } bool isPositionReached(float tolerance = 0.5) { float error = calculateShortestPathError( encoder.getAbsolutePosition(), targetPosition ); return abs(error) < tolerance; } };
۲. سیستم اندازهگیری طول:
class LengthMeasurementSystem { private: RotaryEncoder encoder; float wheelDiameter; // قطر غلتک بر حسب mm float circumference; float totalLength; public: LengthMeasurementSystem(int a, int b, float diameter) : encoder(a, b, -1, 500), wheelDiameter(diameter) { circumference = PI * wheelDiameter; totalLength = 0.0; } void update() { encoder.updateVelocity(); // محاسبه جابجایی خطی float angularChange = encoder.getAngularVelocity() * 0.001; // rad در ms float linearDisplacement = (angularChange * wheelDiameter) / 2.0; totalLength += linearDisplacement; } float getLength() { return totalLength; } float getSpeed() { return encoder.getAngularVelocity() * wheelDiameter / 2.0; } void resetLength() { totalLength = 0.0; } void calibrate(float knownLength) { // کالیبراسیون سیستم float measuredLength = getLength(); float correctionFactor = knownLength / measuredLength; circumference *= correctionFactor; Serial.print("کالیبراسیون انجام شد. ضریب اصلاح: "); Serial.println(correctionFactor, 4); } };
۳. سیستم شمارنده تولید:
class ProductionCounter { private: RotaryEncoder encoder; int itemsPerRevolution; int totalCount; int batchCount; float thresholdAngle; public: ProductionCounter(int a, int b, int itemsPerRev) : encoder(a, b, -1, 100), itemsPerRevolution(itemsPerRev) { totalCount = 0; batchCount = 0; thresholdAngle = 360.0 / itemsPerRevolution; } void monitor() { static float lastPosition = 0.0; encoder.updateVelocity(); float currentPosition = encoder.getAbsolutePosition(); // محاسبه تغییر موقعیت float positionChange = currentPosition - lastPosition; if (positionChange < 0) positionChange += 360.0; // شمارش آیتمها int itemsDetected = positionChange / thresholdAngle; if (itemsDetected > 0) { totalCount += itemsDetected; batchCount += itemsDetected; Serial.print("تعداد آیتم: "); Serial.print(itemsDetected); Serial.print(" | کل تولید: "); Serial.println(totalCount); // بررسی سقف تولید if (batchCount >= 1000) { Serial.println("🎯 دسته تولید 1000 تایی تکمیل شد"); batchCount = 0; } } lastPosition = currentPosition; } int getTotalCount() { return totalCount; } int getBatchCount() { return batchCount; } void resetBatch() { batchCount = 0; } void resetTotal() { totalCount = 0; } };
🔧 نصب و کالیبراسیون
مراحل نصب مکانیکی:
-
هممرکز کردن: محور انکودر و شفت موتور باید کاملاً هممرکز باشد
-
کوپلینگ: استفاده از کوپلینگ انعطافپذیر برای جذب ناهماهنگی
-
نصب محکم: جلوگیری از لرزش و ارتعاش
-
محافظت: نصب پوشش ضد گرد و غبار
کالیبراسیون نرمافزاری:
void calibrationRoutine() { Serial.println("=== کالیبراسیون انکودر ==="); // 1. کالیبراسیون نقطه صفر calibrateZeroPoint(); // 2. کالیبراسیون جهت calibrateDirection(); // 3. کالیبراسیون رزولوشن calibrateResolution(); // 4. تست خطی بودن testLinearity(); Serial.println("کالیبراسیون کامل شد"); } void calibrateResolution() { Serial.println("کالیبراسیون رزولوشن:"); Serial.println("انکودر را دقیقاً 10 دور بچرخانید..."); long startCount = encoderCount; delay(10000); // زمان برای چرخاندن long endCount = encoderCount; long pulsesPer10Rev = endCount - startCount; float calculatedPPR = pulsesPer10Rev / 40.0; // 4X decoding Serial.print("رزولوشن محاسبه شده: "); Serial.print(calculatedPPR, 1); Serial.println(" PPR"); }
⚡ بهینهسازی عملکرد
فیلتر دیجیتال برای کاهش نویز:
class DigitalFilter { private: float* buffer; int size; int index; float sum; public: DigitalFilter(int filterSize) : size(filterSize) { buffer = new float[size]; for (int i = 0; i < size; i++) buffer[i] = 0.0; index = 0; sum = 0.0; } ~DigitalFilter() { delete[] buffer; } float update(float newValue) { sum -= buffer[index]; buffer[index] = newValue; sum += newValue; index = (index + 1) % size; return sum / size; } void reset() { for (int i = 0; i < size; i++) buffer[i] = 0.0; sum = 0.0; index = 0; } }; // استفاده DigitalFilter rpmFilter(10); // فیلتر میانگین متحرک 10 نمونهای void smoothRPMReading() { float rawRPM = encoder.getRPM(); float filteredRPM = rpmFilter.update(rawRPM); if (abs(rawRPM - filteredRPM) > 50.0) { Serial.println("⚠️ نویز زیاد در خوانش RPM"); } }
جبران سازی Backlash:
class BacklashCompensation { private: float backlashAngle; // زاویه لقی مکانیکی bool lastDirection; float compensation; public: BacklashCompensation(float angle) : backlashAngle(angle) { lastDirection = true; // CW compensation = 0.0; } float compensate(float rawPosition, bool currentDirection) { if (currentDirection != lastDirection) { // تغییر جهت - اعمال جبران لقی compensation = currentDirection ? backlashAngle : -backlashAngle; lastDirection = currentDirection; } return rawPosition + compensation; } void calibrate() { Serial.println("کالیبراسیون لقی مکانیکی:"); Serial.println("به آرامی در هر دو جهت حرکت دهید..."); // روش کالیبراسیون // ... } };
🛡️ حفاظت و عیبیابی
سیستم مانیتورینگ سلامت:
class EncoderHealthMonitor { private: RotaryEncoder& encoder; unsigned long lastPulseTime; float expectedMinRPM; bool encoderFault; public: EncoderHealthMonitor(RotaryEncoder& enc, float minRPM = 10.0) : encoder(enc), expectedMinRPM(minRPM) { lastPulseTime = 0; encoderFault = false; } void monitor() { encoder.updateVelocity(); float currentRPM = encoder.getRPM(); // بررسی سرعت if (abs(currentRPM) > 0.1 && abs(currentRPM) < expectedMinRPM) { Serial.println("⚠️ سرعت غیرعادی پایین"); } // بررسی پالسها if (currentRPM == 0.0 && millis() - lastPulseTime > 5000) { Serial.println("⚠️ عدم دریافت پالس در 5 ثانیه"); encoderFault = true; } // بهروزرسانی زمان آخرین پالس if (currentRPM != 0.0) { lastPulseTime = millis(); encoderFault = false; } } bool hasFault() { return encoderFault; } void runDiagnostics() { Serial.println("=== تست تشخیصی انکودر ==="); // تست کانال A testChannel(encoder.getPinA(), "کانال A"); // تست کانال B testChannel(encoder.getPinB(), "کانال B"); // تست کانال Z if (encoder.hasIndex()) { testChannel(encoder.getPinZ(), "کانال Z"); } // تست تغذیه testPowerSupply(); Serial.println("تست تشخیصی کامل شد"); } };
📈 انتخاب انکودر مناسب
مقایسه انواع انکودر:
| پارامتر | انکودر افزایشی | انکودر مطلق | انکودر مغناطیسی |
|---|---|---|---|
| قیمت | کم | متوسط تا زیاد | متوسط |
| دقت | بالا | بسیار بالا | متوسط |
| سرعت | بسیار بالا | بالا | بالا |
| پس از خاموشی | از دست میرود | حفظ میشود | از دست میرود |
| مقاومت محیطی | متوسط | بالا | بسیار بالا |
راهنمای انتخاب:
enum ApplicationType { ROBOTICS, // نیاز به دقت و سرعت بالا CNC_MACHINE, // نیاز به موقعیت مطلق CONVEYOR, // نیاز به دوام در محیط صنعتی LAB_EQUIPMENT, // نیاز به دقت بسیار بالا AUTOMOTIVE, // نیاز به مقاومت در دماهای شدید }; RotaryEncoder* selectEncoder(ApplicationType app, int budget, int precision) { switch(app) { case ROBOTICS: return new RotaryEncoder(2, 3, -1, 2000); // 2000 PPR نوری case CNC_MACHINE: // انکودر مطلق با رابط SSI return new AbsoluteEncoder(/* پارامترها */); case CONVEYOR: return new RotaryEncoder(2, 3, -1, 500); // 500 PPR مغناطیسی case LAB_EQUIPMENT: return new HighPrecisionEncoder(/* پارامترها */); // 5000 PPR case AUTOMOTIVE: return new AutomotiveEncoder(/* پارامترها */); } return nullptr; }
🚀 پروژههای پیشرفته
۱. سیستم CNC خانگی:
class CNCController { private: RotaryEncoder xAxis, yAxis, zAxis; float xPos, yPos, zPos; public: CNCController() : xAxis(2, 3, 4, 2000), yAxis(5, 6, 7, 2000), zAxis(8, 9, 10, 1000) { xPos = yPos = zPos = 0.0; } void updatePositions() { xAxis.updateVelocity(); yAxis.updateVelocity(); zAxis.updateVelocity(); // انتگرال گیری برای موقعیت static unsigned long lastUpdate = 0; unsigned long now = micros(); float dt = (now - lastUpdate) / 1000000.0; xPos += xAxis.getAngularVelocity() * dt * SCREW_PITCH_X; yPos += yAxis.getAngularVelocity() * dt * SCREW_PITCH_Y; zPos += zAxis.getAngularVelocity() * dt * SCREW_PITCH_Z; lastUpdate = now; } void moveTo(float x, float y, float z) { // کنترل حلقه بسته موقعیت // ... } void printStatus() { Serial.print("X: "); Serial.print(xPos, 3); Serial.print("mm Y: "); Serial.print(yPos, 3); Serial.print("mm Z: "); Serial.print(zPos, 3); Serial.println("mm"); } };
۲. تستبنچ موتور:
class MotorTestBench { private: RotaryEncoder encoder; float torqueConstant; float noLoadRPM; float stallTorque; public: MotorTestBench(int a, int b, int ppr) : encoder(a, b, -1, ppr) { torqueConstant = 0.0; noLoadRPM = 0.0; stallTorque = 0.0; } void characterizeMotor(float voltage) { Serial.println("=== مشخصهیابی موتور ==="); // تست بدون بار testNoLoad(voltage); // تست با بار testWithLoad(voltage); // تست استال testStall(voltage); // محاسبه ثابتها calculateConstants(); printMotorSpecs(); } void testNoLoad(float voltage) { Serial.println("تست بدون بار..."); // ... } void calculateEfficiency(float inputPower, float outputPower) { float efficiency = (outputPower / inputPower) * 100.0; Serial.print("راندمان موتور: "); Serial.print(efficiency, 1); Serial.println("%"); if (efficiency < 60.0) { Serial.println("⚠️ راندمان پایین - موتور نیاز به بررسی دارد"); } } };
📦 مشخصات فنی محصولات رایج
انکودرهای مرسوم بازار:
-
Omron E6B2-CWZ6C: 1000 PPR، خروجی خط کشیده
-
Autonics E50S8: 600 PPR، بدنه فلزی
-
SICK DFS60: 5000 PPR، دقت 0.036 درجه
-
Baumer BHK: 1024 PPR، خروجی Push-Pull
-
Pepperl+Fuchs: 4096 PPR، رابط SSI
ویژگیهای بستهبندی:
-
کوپلینگ انعطافپذیر
-
کابل شیلددار
-
براکت نصب
-
پیچ و مهره کامل
-
راهنمای نصب چندزبانه
-
درایور و کتابخانه نرمافزاری
⚠️ ملاحظات ایمنی و نگهداری
اقدامات ایمنی:
-
ایزولاسیون: جداسازی بخش قدرت و سیگنال
-
گرمابری: استفاده از هیتسینک در سرعتهای بالا
-
محافظ نویز: فیلتر EMI در ورودی تغذیه
-
محافظ مکانیکی: پوشش ضد ضربه و گرد و غبار
برنامه نگهداری:
-
روزانه: بررسی اتصالات و تمیزکاری سطحی
-
هفتگی: کالیبراسیون موقعیت صفر
-
ماهانه: تست کامل عملکرد
-
سالانه: تعویض بلبرینگها در صورت نیاز
🌟 نتیجهگیری
ماژول انکودر چرخشی یک جزء حیاتی در سیستمهای کنترل حرکت مدرن است. با انتخاب نوع مناسب (افزایشی، مطلق، نوری یا مغناطیسی) و رزولوشن کافی، میتوان به دقت و قابلیت اطمینان مورد نیاز در کاربردهای مختلف دست یافت.
دقت در حرکت، اطمینان در کنترل

