








")





")




نقشه ماژول اپتوکوپلر دو حالته
50,000 تومانهر فایل
اپتوکوپلرها برای سوئیچ کردن قطعات الکترونیکی بزرگتر مانند ترانزیستورها و ترایاکها در جداسازی بین سیگنال کنترل ولتاژ پایین در میکروکنترلرها و سیگنال خروجی جریان اصلی با ولتاژ بالا مورد استفاده قرار میگیرند.
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
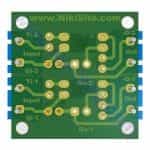
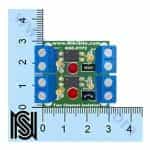
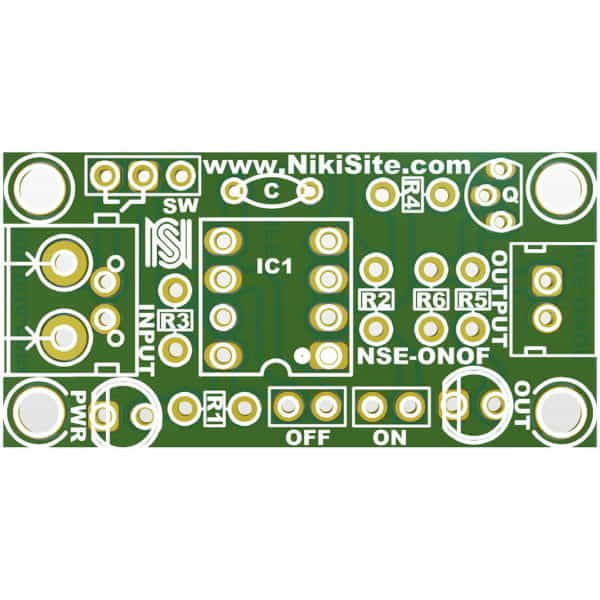
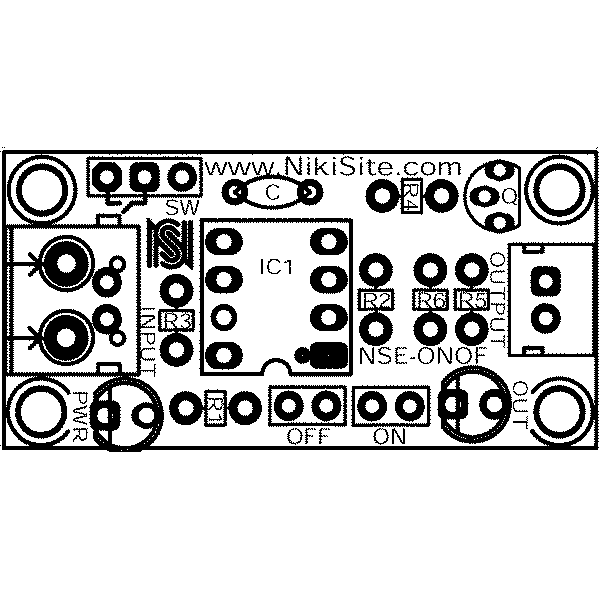
ماژول اپتوکوپلر دو حالته
Dual Optocoupler Module
| Quantity | Code | Symbol |
|---|---|---|
| 2 | Optocoupler PS817 | OPT |
| 4 | 3.3K | R |
| 2 | 3mm LED | LED |
| 2 | Jumper | J |
| 4 | Connector Box 2pin | CB |
| 2Pin*2 | Pin Header 1x2 SIL Straight Male | PH |
| 3cm x 3cm | Single Side with Solder Mask and Helper | PCB |
ایزولاتور دوتایی برای کاربردهای پیشرفته
⚡ اپتوکوپلر دو حالته: جداسازی هوشمند دوطرفه برای سیستمهای پیچیده
ماژول اپتوکوپلر دو حالته (Dual Channel Optocoupler) یک راهحل پیشرفته برای ایزوله کردن دو سیگنال به طور مستقل یا ایجاد دروازههای منطقی ایزوله است. این ماژول امکان ارتباط امن دوطرفه یا کنترل مستقل دو کانال را فراهم میکند.
🎯 ویژگیهای متمایز دو حالته
🔌 طراحی دو کاناله:
دو کانال مستقل: کنترل مجزای دو سیگنال
ایزولاسیون کامل: جداسازی هر کانال از یکدیگر و از مدارهای خارجی
پیکربندی انعطافپذیر: امکان استفاده سری، موازی یا مستقل
⚡ عملکرد پیشرفته:
سرعت همزمان: پاسخ همزمان دو کانال
CTR متعادل: تطابق مشخصات دو کانال
مصرف بهینه: مدیریت هوشمند توان دو کانال
📊 مشخصات فنی پیشرفته
پارامترهای الکتریکی:
ولتاژ ایزولاسیون: 2500Vrms – 5000Vrms بین کانالها
ولتاژ ورودی هر کانال: 1.15V – 1.5V (Vf @ 10mA)
جریان ورودی: 5mA – 50mA در هر کانال
ولتاژ خروجی: 35V – 80V (بسته به مدل)
جریان خروجی کلکتور: 50mA – 150mA در هر کانال
CTR (نسبت انتقال): 50% – 600% با تطابق ±15%
پارامترهای عملکردی:
زمان پاسخ هر کانال:
Ton: 3µs – 18µs
Toff: 3µs – 18µs
فرکانس کاری: تا 80kHz در هر کانال
دمای کاری: -40°C تا +100°C
تطابق کانالها:
تطابق CTR: ±15% max
تطابق زمان پاسخ: ±10% max
انواع رایج اپتوکوپلر دو حالته:
PC827: دو کاناله، CTR بالا (130%-500%)
4N37: دو کاناله با خروجی دارلینگتون
TLP621-2: سرعت بالا، ایزولاسیون 5000Vrms
LTV-847: چهار کاناله در یک پکیج
HCPL-2730: دو کاناله با خروجی منطقی
🔧 ساختار و پیکربندی
پیکربندی پایههای DIP-8:
پیکربندی استاندارد 8 پایه:
┌───┐
1 │ ● │ 8 پایه 1: آند LED کانال 1
2 │ │ 7 پایه 2: کاتد LED کانال 1
3 │ │ 6 پایه 3: آند LED کانال 2
4 │ │ 5 پایه 4: کاتد LED کانال 2
└───┘ پایه 5: امیتر کانال 2
پایه 6: کلکتور کانال 2
پایه 7: امیتر کانال 1
پایه 8: کلکتور کانال 1ساختمان داخلی:
کانال 1: [LED1] → [نور] → [فوتوترانزیستور1] → خروجی 1
کانال 2: [LED2] → [نور] → [فوتوترانزیستور2] → خروجی 2
↓ ↓ ↓ ↓
ورودی 1 محیط عایق گیرنده 1 خروجی 1
ورودی 2 گیرنده 2 خروجی 2💻 برنامهنویسی و کنترل دو کاناله
اتصال پایه به آردوینو:
// تعریف پایههای اپتوکوپلر دو حالته PC827 #define CH1_INPUT_PIN 2 // کنترل LED کانال 1 #define CH1_OUTPUT_PIN 3 // خواندن خروجی کانال 1 #define CH2_INPUT_PIN 4 // کنترل LED کانال 2 #define CH2_OUTPUT_PIN 5 // خواندن خروجی کانال 2 // پینهای اضافی برای حالتهای خاص #define CH1_ENABLE_PIN 6 // فعالسازی کانال 1 (اختیاری) #define CH2_ENABLE_PIN 7 // فعالسازی کانال 2 (اختیاری) void setupDualOptocoupler() { Serial.begin(115200); // تنظیم پینهای کنترل pinMode(CH1_INPUT_PIN, OUTPUT); pinMode(CH1_OUTPUT_PIN, INPUT); pinMode(CH2_INPUT_PIN, OUTPUT); pinMode(CH2_OUTPUT_PIN, INPUT); // تنظیم پینهای فعالسازی if (CH1_ENABLE_PIN != -1) { pinMode(CH1_ENABLE_PIN, OUTPUT); digitalWrite(CH1_ENABLE_PIN, HIGH); // فعال به طور پیشفرض } if (CH2_ENABLE_PIN != -1) { pinMode(CH2_ENABLE_PIN, OUTPUT); digitalWrite(CH2_ENABLE_PIN, HIGH); } // حالت اولیه digitalWrite(CH1_INPUT_PIN, LOW); digitalWrite(CH2_INPUT_PIN, LOW); Serial.println("ماژول اپتوکوپلر دو حالته راهاندازی شد"); Serial.println("====================================="); // تست اولیه testBothChannels(); } void testBothChannels() { Serial.println("=== تست اولیه دو کانال ==="); // تست کانال 1 Serial.println("تست کانال 1:"); testSingleChannel(CH1_INPUT_PIN, CH1_OUTPUT_PIN, "کانال 1"); // تست کانال 2 Serial.println("تست کانال 2:"); testSingleChannel(CH2_INPUT_PIN, CH2_OUTPUT_PIN, "کانال 2"); // تست همزمان Serial.println("تست همزمان دو کانال:"); testSimultaneous(); } void testSingleChannel(int inputPin, int outputPin, String channelName) { digitalWrite(inputPin, HIGH); delayMicroseconds(50); bool outputState = digitalRead(outputPin); Serial.print(channelName); Serial.print(" - ورودی HIGH، خروجی: "); Serial.println(outputState ? "HIGH" : "LOW"); digitalWrite(inputPin, LOW); delayMicroseconds(50); outputState = digitalRead(outputPin); Serial.print(channelName); Serial.print(" - ورودی LOW، خروجی: "); Serial.println(outputState ? "HIGH" : "LOW"); }
کلاس مدیریت پیشرفته دو کاناله:
class DualChannelOptocoupler { private: struct Channel { int inputPin; int outputPin; int enablePin; bool isEnabled; bool isInverting; unsigned long responseTime; float ctr; String name; }; Channel channels[2]; bool channelsSynchronized; public: DualChannelOptocoupler( int ch1In, int ch1Out, int ch2In, int ch2Out, int ch1En = -1, int ch2En = -1, bool ch1Inv = false, bool ch2Inv = false ) { // تنظیم کانال 1 channels[0].inputPin = ch1In; channels[0].outputPin = ch1Out; channels[0].enablePin = ch1En; channels[0].isInverting = ch1Inv; channels[0].isEnabled = true; channels[0].responseTime = 10; channels[0].ctr = 100.0; channels[0].name = "کانال 1"; // تنظیم کانال 2 channels[1].inputPin = ch2In; channels[1].outputPin = ch2Out; channels[1].enablePin = ch2En; channels[1].isInverting = ch2Inv; channels[1].isEnabled = true; channels[1].responseTime = 10; channels[1].ctr = 100.0; channels[1].name = "کانال 2"; channelsSynchronized = false; // تنظیم پینها initializePins(); } void initializePins() { for (int i = 0; i < 2; i++) { pinMode(channels[i].inputPin, OUTPUT); pinMode(channels[i].outputPin, INPUT); if (channels[i].enablePin != -1) { pinMode(channels[i].enablePin, OUTPUT); digitalWrite(channels[i].enablePin, HIGH); } // حالت اولیه digitalWrite(channels[i].inputPin, LOW); } Serial.println("اپتوکوپلر دو کاناله آماده است"); } void enableChannel(int channel, bool enable) { if (channel >= 0 && channel < 2) { channels[channel].isEnabled = enable; if (channels[channel].enablePin != -1) { digitalWrite(channels[channel].enablePin, enable ? HIGH : LOW); } Serial.print(channels[channel].name); Serial.println(enable ? " فعال شد" : " غیرفعال شد"); } } void setChannel(int channel, bool state) { if (channel >= 0 && channel < 2 && channels[channel].isEnabled) { digitalWrite(channels[channel].inputPin, state ? HIGH : LOW); if (channels[channel].responseTime > 0) { delayMicroseconds(channels[channel].responseTime); } } } bool getChannelOutput(int channel) { if (channel >= 0 && channel < 2) { bool rawState = digitalRead(channels[channel].outputPin); return channels[channel].isInverting ? !rawState : rawState; } return false; } void setBothChannels(bool ch1State, bool ch2State) { if (channelsSynchronized) { // روشن کردن همزمان unsigned long startTime = micros(); digitalWrite(channels[0].inputPin, ch1State ? HIGH : LOW); digitalWrite(channels[1].inputPin, ch2State ? HIGH : LOW); // انتظار برای آهستهترین کانال unsigned long maxResponse = max(channels[0].responseTime, channels[1].responseTime); while (micros() - startTime < maxResponse) { // انتظار } } else { setChannel(0, ch1State); setChannel(1, ch2State); } } void toggleChannel(int channel) { bool currentState = digitalRead(channels[channel].inputPin); setChannel(channel, !currentState); } void toggleBoth() { bool ch1State = digitalRead(channels[0].inputPin); bool ch2State = digitalRead(channels[1].inputPin); setBothChannels(!ch1State, !ch2State); } void pulseChannel(int channel, unsigned long durationUs) { setChannel(channel, HIGH); delayMicroseconds(durationUs); setChannel(channel, LOW); } void pulseBoth(unsigned long durationUs, bool simultaneous = true) { if (simultaneous) { unsigned long startTime = micros(); setBothChannels(HIGH, HIGH); while (micros() - startTime < durationUs) { // انتظار } setBothChannels(LOW, LOW); } else { pulseChannel(0, durationUs); pulseChannel(1, durationUs); } } void setResponseTime(int channel, unsigned long timeUs) { if (channel >= 0 && channel < 2) { channels[channel].responseTime = timeUs; Serial.print(channels[channel].name); Serial.print(" - زمان پاسخ تنظیم شد: "); Serial.print(timeUs); Serial.println(" µs"); } } void synchronizeChannels(bool sync) { channelsSynchronized = sync; Serial.print("همگامسازی کانالها: "); Serial.println(sync ? "فعال" : "غیرفعال"); } void measureChannelMatching() { Serial.println("=== اندازهگیری تطابق کانالها ==="); unsigned long responseTimes[2][2]; // [کانال][Ton/Toff] // اندازهگیری زمان روشن شدن for (int i = 0; i < 2; i++) { unsigned long startTime = micros(); setChannel(i, HIGH); responseTimes[i][0] = micros() - startTime; } // اندازهگیری زمان خاموش شدن for (int i = 0; i < 2; i++) { unsigned long startTime = micros(); setChannel(i, LOW); responseTimes[i][1] = micros() - startTime; } // نمایش نتایج Serial.println("کانال | Ton (µs) | Toff (µs)"); Serial.println("------|----------|----------"); for (int i = 0; i < 2; i++) { Serial.print(channels[i].name); Serial.print(" | "); Serial.print(responseTimes[i][0]); Serial.print(" | "); Serial.println(responseTimes[i][1]); } // محاسبه اختلاف unsigned long tonDiff = abs(responseTimes[0][0] - responseTimes[1][0]); unsigned long toffDiff = abs(responseTimes[0][1] - responseTimes[1][1]); Serial.print("اختلاف Ton: "); Serial.print(tonDiff); Serial.print("µs ("); Serial.print((tonDiff * 100.0) / max(responseTimes[0][0], responseTimes[1][0]), 1); Serial.println("%)"); Serial.print("اختلاف Toff: "); Serial.print(toffDiff); Serial.print("µs ("); Serial.print((toffDiff * 100.0) / max(responseTimes[0][1], responseTimes[1][1]), 1); Serial.println("%)"); } void runComprehensiveTest() { Serial.println("=== تست جامع دو کاناله ==="); // تست تکی for (int i = 0; i < 2; i++) { Serial.println("\n" + channels[i].name + ":"); channelComprehensiveTest(i); } // تست همزمان Serial.println("\nتست همزمان:"); simultaneousChannelTest(); // تست تطابق Serial.println("\nتست تطابق:"); measureChannelMatching(); Serial.println("\n✅ تست کامل شد"); } void channelComprehensiveTest(int channel) { // تست پالسهای مختلف unsigned long pulseWidths[] = {10, 50, 100, 500, 1000}; // µs for (int i = 0; i < 5; i++) { Serial.print("پالس "); Serial.print(pulseWidths[i]); Serial.print("µs: "); unsigned long errors = 0; for (int j = 0; j < 10; j++) { unsigned long startTime = micros(); setChannel(channel, HIGH); bool onState = getChannelOutput(channel); delayMicroseconds(pulseWidths[i]); setChannel(channel, LOW); bool offState = getChannelOutput(channel); unsigned long endTime = micros(); if (!onState || offState) { errors++; } delayMicroseconds(100); // فاصله بین پالسها } if (errors == 0) { Serial.println("✅ PASS"); } else { Serial.print("❌ FAIL ("); Serial.print(errors); Serial.println(" خطا)"); } } } };
⚙️ کاربردهای پیشرفته
۱. دروازه منطقی ایزوله شده:
class IsolatedLogicGate { private: DualChannelOptocoupler opto; bool lastOutput; public: IsolatedLogicGate(int ch1In, int ch1Out, int ch2In, int ch2Out) : opto(ch1In, ch1Out, ch2In, ch2Out) { lastOutput = false; } // AND Gate ایزوله bool isolatedAND(bool inputA, bool inputB) { opto.setChannel(0, inputA); opto.setChannel(1, inputB); bool outputA = opto.getChannelOutput(0); bool outputB = opto.getChannelOutput(1); return outputA && outputB; } // OR Gate ایزوله bool isolatedOR(bool inputA, bool inputB) { opto.setChannel(0, inputA); opto.setChannel(1, inputB); bool outputA = opto.getChannelOutput(0); bool outputB = opto.getChannelOutput(1); return outputA || outputB; } // XOR Gate ایزوله bool isolatedXOR(bool inputA, bool inputB) { opto.setChannel(0, inputA); opto.setChannel(1, inputB); bool outputA = opto.getChannelOutput(0); bool outputB = opto.getChannelOutput(1); return outputA != outputB; } // NAND Gate ایزوله bool isolatedNAND(bool inputA, bool inputB) { return !isolatedAND(inputA, inputB); } // Flip-Flop ایزوله bool isolatedSRFlipFlop(bool set, bool reset) { static bool state = false; if (set && !reset) { state = true; } else if (!set && reset) { state = false; } // اگر هر دو 1 باشند، حالت تعریف نشده opto.setChannel(0, state); opto.setChannel(1, !state); // خروجی معکوس return state; } // Schmitt Trigger ایزوله bool isolatedSchmittTrigger(float voltage, float lowThreshold, float highThreshold) { static bool state = false; if (voltage > highThreshold) { state = true; } else if (voltage < lowThreshold) { state = false; } opto.setChannel(0, state); return state; } };
۲. درایور پل H ایزوله:
class IsolatedHBridgeDriver { private: DualChannelOptocoupler highSideOpto; DualChannelOptocoupler lowSideOpto; float deadTime; // میکروثانیه enum BridgeState { STOP, FORWARD, REVERSE, BRAKE } currentState; public: IsolatedHBridgeDriver( // High Side int hsCh1In, int hsCh1Out, int hsCh2In, int hsCh2Out, // Low Side int lsCh1In, int lsCh1Out, int lsCh2In, int lsCh2Out, float deadTimeUs = 2.0 ) : highSideOpto(hsCh1In, hsCh1Out, hsCh2In, hsCh2Out), lowSideOpto(lsCh1In, lsCh1Out, lsCh2In, lsCh2Out), deadTime(deadTimeUs) { currentState = STOP; highSideOpto.synchronizeChannels(true); lowSideOpto.synchronizeChannels(true); // غیرفعال کردن همه کانالها در ابتدا stop(); } void forward() { if (currentState != FORWARD) { // خاموش کردن قبلی stop(); delayMicroseconds(deadTime * 2); // روشن کردن Forward // High Side چپ، Low Side راست highSideOpto.setChannel(0, HIGH); // HS Left lowSideOpto.setChannel(1, HIGH); // LS Right currentState = FORWARD; Serial.println("🔄 حرکت رو به جلو"); } } void reverse() { if (currentState != REVERSE) { stop(); delayMicroseconds(deadTime * 2); // روشن کردن Reverse // High Side راست، Low Side چپ highSideOpto.setChannel(1, HIGH); // HS Right lowSideOpto.setChannel(0, HIGH); // LS Left currentState = REVERSE; Serial.println("🔁 حرکت معکوس"); } } void stop() { // خاموش کردن همه highSideOpto.setBothChannels(LOW, LOW); lowSideOpto.setBothChannels(LOW, LOW); currentState = STOP; Serial.println("⏹️ توقف"); } void brake() { // ترمز با اتصال کوتاه موتور highSideOpto.setBothChannels(LOW, LOW); lowSideOpto.setBothChannels(HIGH, HIGH); delay(100); // زمان ترمز stop(); currentState = BRAKE; Serial.println("🛑 ترمز فعال"); } void pwmControl(float dutyCycle, bool direction) { // کنترل PWM با جلوگیری از شوت-ترو unsigned long period = 1000; // 1ms دوره unsigned long onTime = period * dutyCycle; if (direction) { // Forward PWM highSideOpto.setChannel(0, HIGH); lowSideOpto.setChannel(1, HIGH); delayMicroseconds(onTime); highSideOpto.setChannel(0, LOW); delayMicroseconds(deadTime); lowSideOpto.setChannel(1, LOW); } else { // Reverse PWM highSideOpto.setChannel(1, HIGH); lowSideOpto.setChannel(0, HIGH); delayMicroseconds(onTime); highSideOpto.setChannel(1, LOW); delayMicroseconds(deadTime); lowSideOpto.setChannel(0, LOW); } } BridgeState getState() { return currentState; } void diagnosticCheck() { Serial.println("=== تست تشخیصی درایور پل H ==="); // تست High Side Serial.println("تست High Side:"); testHalfBridge(highSideOpto); // تست Low Side Serial.println("تست Low Side:"); testHalfBridge(lowSideOpto); // تست امنیت checkSafety(); } };
۳. ارتباط سریال ایزوله دوطرفه:
class IsolatedSerialDuplex { private: DualChannelOptocoupler txOpto; // ارسال DualChannelOptocoupler rxOpto; // دریافت int baudRate; unsigned long bitTime; public: IsolatedSerialDuplex( // Transmitter int txCh1In, int txCh1Out, int txCh2In, int txCh2Out, // Receiver int rxCh1In, int rxCh1Out, int rxCh2In, int rxCh2Out, int baud = 9600 ) : txOpto(txCh1In, txCh1Out, txCh2In, txCh2Out), rxOpto(rxCh1In, rxCh1Out, rxCh2In, rxCh2Out) { baudRate = baud; bitTime = 1000000 / baudRate; // میکروثانیه // تنظیم کانالها برای ارتباط دوطرفه txOpto.synchronizeChannels(true); rxOpto.synchronizeChannels(false); } void sendChar(char c) { // Start bit (LOW) txOpto.setBothChannels(LOW, LOW); delayMicroseconds(bitTime); // 8 Data bits (LSB first) for (int i = 0; i < 8; i++) { bool bit = (c >> i) & 0x01; txOpto.setBothChannels(bit ? HIGH : LOW, bit ? HIGH : LOW); delayMicroseconds(bitTime); } // Stop bit (HIGH) txOpto.setBothChannels(HIGH, HIGH); delayMicroseconds(bitTime * 2); // دو بیت توقف برای اطمینان } void sendString(const String& str) { for (int i = 0; i < str.length(); i++) { sendChar(str.charAt(i)); } } char receiveChar() { char received = 0; // منتظر Start bit waitForStartBit(); // خواندن 8 بیت داده for (int i = 0; i < 8; i++) { delayMicroseconds(bitTime * 1.5); // نمونهبرداری در وسط بیت bool bit1 = rxOpto.getChannelOutput(0); bool bit2 = rxOpto.getChannelOutput(1); // استفاده از کانالی که سیگنال واضحتری دارد bool bit = (bit1 && !bit2) ? true : (!bit1 && bit2) ? false : bit1; if (bit) { received |= (1 << i); } } // منتظر Stop bit delayMicroseconds(bitTime); return received; } String receiveString(int maxLength = 64) { String str = ""; int count = 0; while (count < maxLength) { char c = receiveChar(); if (c == '\0' || c == '\n') { break; } str += c; count++; } return str; } void halfDuplexCommunication(String message) { // ارتباط نیمه دوطرفه Serial.print("ارسال: "); Serial.println(message); sendString(message); // تغییر حالت به دریافت delay(100); Serial.print("دریافت: "); String response = receiveString(); Serial.println(response); } private: void waitForStartBit() { // منتظر LOW شدن (Start bit) while (true) { bool ch1 = rxOpto.getChannelOutput(0); bool ch2 = rxOpto.getChannelOutput(1); if (!ch1 && !ch2) { // Start bit تشخیص داده شد delayMicroseconds(bitTime * 1.5); // به وسط Start bit برو break; } delayMicroseconds(10); } } };
🔧 پیکربندیهای مدار
مدارهای کاربردی دو حالته:
// 1. حالت موازی برای جریان بالاتر void parallelConfiguration() { Serial.println("پیکربندی موازی برای جریان بالاتر:"); Serial.println("کانالها به صورت موازی برای دوبرابر کردن جریان خروجی"); Serial.println("LEDها سری با مقاومتهای جداگانه"); Serial.println("خروجیها موازی با مقاومت بار مشترک"); } // 2. حالت سری برای ولتاژ بالاتر void seriesConfiguration() { Serial.println("پیکربندی سری برای ولتاژ بالاتر:"); Serial.println("خروجیها به صورت سری برای جمع ولتاژها"); Serial.println("محدودیت: جریان یکسان در هر دو کانال"); } // 3. حالت تفاضلی برای نویزگیری بهتر void differentialConfiguration() { Serial.println("پیکربندی تفاضلی:"); Serial.println("یک کانال برای سیگنال، دیگری برای زمین مجازی"); Serial.println("نویز مد-مشترک حذف میشود"); } // 4. حالت Redundant برای اطمینان بالا void redundantConfiguration() { Serial.println("پیکربندی افزونگی:"); Serial.println("هر دو کانال سیگنال یکسان را منتقل میکنند"); Serial.println("اگر یک کانال خراب شود، کانال دیگر کار میکند"); Serial.println("برای کاربردهای بحرانی"); }
مدار درایور استپر موتور ایزوله:
class IsolatedStepperDriver { private: DualChannelOptocoupler coilAOpto; DualChannelOptocoupler coilBOpto; int stepSequence[4][2] = { {HIGH, LOW}, {LOW, HIGH}, {LOW, HIGH}, {HIGH, LOW} }; int currentStep; int stepsPerRevolution; public: IsolatedStepperDriver( // Coil A int aCh1In, int aCh1Out, int aCh2In, int aCh2Out, // Coil B int bCh1In, int bCh1Out, int bCh2In, int bCh2Out, int steps = 200 ) : coilAOpto(aCh1In, aCh1Out, aCh2In, aCh2Out), coilBOpto(bCh1In, bCh1Out, bCh2In, bCh2Out) { currentStep = 0; stepsPerRevolution = steps; coilAOpto.synchronizeChannels(true); coilBOpto.synchronizeChannels(true); } void step(int direction) { // direction: 1 برای جلو، -1 برای عقب currentStep = (currentStep + direction + 4) % 4; coilAOpto.setBothChannels( stepSequence[currentStep][0], stepSequence[currentStep][0] ); coilBOpto.setBothChannels( stepSequence[currentStep][1], stepSequence[currentStep][1] ); } void stepAngle(float angle) { int stepsNeeded = (angle / 360.0) * stepsPerRevolution; for (int i = 0; i < abs(stepsNeeded); i++) { step(stepsNeeded > 0 ? 1 : -1); delay(10); // زمان بین استپها } } void microstep(int microstepLevel, float current) { // میکرواستپینگ با کنترل جریان // microstepLevel: 1, 2, 4, 8, 16 // current: جریان نسبی (0.0 تا 1.0) for (int i = 0; i < microstepLevel; i++) { float angle = (2 * PI * i) / microstepLevel; float aCurrent = current * sin(angle); float bCurrent = current * cos(angle); // کنترل PWM بر اساس جریان // (پیادهسازی بسته به سختافزار) } } void enable(bool state) { if (!state) { coilAOpto.setBothChannels(LOW, LOW); coilBOpto.setBothChannels(LOW, LOW); } } int getPosition() { return currentStep; } float getAngle() { return (currentStep * 360.0) / 4.0; } };
⚡ تست و کالیبراسیون پیشرفته
روال کالیبراسیون دو کاناله:
void dualChannelCalibration() { Serial.println("=== کالیبراسیون اپتوکوپلر دو حالته ==="); // 1. کالیبراسیون CTR تطبیقی Serial.println("1. کالیبراسیون CTR تطبیقی:"); calibrateCTRMatch(); // 2. کالیبراسیون زمان پاسخ Serial.println("\n2. کالیبراسیون زمان پاسخ:"); calibrateResponseTimeMatch(); // 3. کالیبراسیون تطابق کانالها Serial.println("\n3. کالیبراسیون تطابق کانالها:"); calibrateChannelMatching(); // 4. تست ایزولاسیون متقابل Serial.println("\n4. تست ایزولاسیون متقابل:"); testCrossIsolation(); Serial.println("\n✅ کالیبراسیون کامل شد"); } void calibrateCTRMatch() { Serial.println("هدف: تطابق CTR دو کانال"); float ctrValues[2]; float ctrRatios[5]; // در جریانهای مختلف for (int current = 5; current <= 25; current += 5) { Serial.print("جریان " + String(current) + "mA: "); for (int ch = 0; ch < 2; ch++) { // تنظیم جریان ورودی // (با PWM یا منبع جریان) // اندازهگیری جریان خروجی float outputCurrent = measureOutputCurrent(ch); ctrValues[ch] = (outputCurrent / current) * 100.0; } float ratio = ctrValues[0] / ctrValues[1]; ctrRatios[(current/5)-1] = ratio; Serial.print("CTR1="); Serial.print(ctrValues[0], 1); Serial.print("%, CTR2="); Serial.print(ctrValues[1], 1); Serial.print("%, نسبت="); Serial.println(ratio, 3); } // تحلیل تطابق float avgRatio = 0; for (int i = 0; i < 5; i++) avgRatio += ctrRatios[i]; avgRatio /= 5.0; Serial.print("نسبت CTR متوسط: "); Serial.println(avgRatio, 3); if (abs(avgRatio - 1.0) > 0.15) { Serial.println("⚠️ تطابق CTR ضعیف است"); } }
تست پایداری دمایی:
void temperatureStabilityTest() { Serial.println("=== تست پایداری دمایی ==="); Serial.println("تغییرات CTR با دما"); float temperatures[] = {-20, 0, 25, 50, 75, 100}; // °C float ctrData[2][6]; // [کانال][دما] for (int t = 0; t < 6; t++) { Serial.print("دما: "); Serial.print(temperatures[t]); Serial.println("°C"); // تنظیم دمای محیط (در محیط کنترل شده) setTestTemperature(temperatures[t]); delay(5000); // تثبیت دما for (int ch = 0; ch < 2; ch++) { ctrData[ch][t] = measureCTRAtTemperature(ch, 10.0); // 10mA } Serial.print(" کانال 1 CTR: "); Serial.print(ctrData[0][t], 1); Serial.print("% | کانال 2 CTR: "); Serial.print(ctrData[1][t], 1); Serial.println("%"); } // تحلیل نتایج analyzeTemperatureStability(ctrData, temperatures, 6); }
🛡️ ملاحظات ایمنی پیشرفته
حفاظتهای چندلایه:
class AdvancedSafetyProtection { private: DualChannelOptocoupler opto; float maxCurrentPerChannel; float maxPowerDissipation; unsigned long overcurrentTimer; bool safetyEnabled; public: AdvancedSafetyProtection(DualChannelOptocoupler& o, float maxCurrent, float maxPower) : opto(o), maxCurrentPerChannel(maxCurrent), maxPowerDissipation(maxPower) { safetyEnabled = true; overcurrentTimer = 0; } bool safeChannelControl(int channel, bool state, float measuredCurrent) { if (!safetyEnabled) { opto.setChannel(channel, state); return true; } // بررسی جریان if (measuredCurrent > maxCurrentPerChannel) { Serial.print("⚠️ جریان کانال "); Serial.print(channel); Serial.print(" بیش از حد: "); Serial.print(measuredCurrent, 1); Serial.println("mA"); if (millis() - overcurrentTimer > 1000) { emergencyShutdown(); return false; } } else { overcurrentTimer = 0; } // بررسی توان تلفاتی float power = calculatePowerDissipation(channel, measuredCurrent); if (power > maxPowerDissipation) { Serial.println("⚠️ توان تلفاتی بیش از حد"); reduceCurrent(channel); } // کنترل نهایی opto.setChannel(channel, state); return true; } void emergencyShutdown() { Serial.println("🚨 خاموشی اضطراری همه کانالها"); opto.setBothChannels(LOW, LOW); overcurrentTimer = millis(); } void enableSafety(bool enable) { safetyEnabled = enable; Serial.print("حفاظت ایمنی: "); Serial.println(enable ? "فعال" : "غیرفعال"); } float calculatePowerDissipation(int channel, float current) { // محاسبه توان تلفاتی float vceSat = 0.3; // ولت (اشباع) float vf = 1.2; // ولت (LED) float powerTransistor = current * vceSat; float powerLED = current * vf; return powerTransistor + powerLED; } void reduceCurrent(int channel) { // کاهش جریان با PWM Serial.print("کاهش جریان کانال "); Serial.println(channel); // پیادهسازی PWM برای کاهش جریان متوسط for (int i = 0; i < 10; i++) { opto.setChannel(channel, HIGH); delayMicroseconds(100); opto.setChannel(channel, LOW); delayMicroseconds(900); } } void runSafetyDiagnostics() { Serial.println("=== تست ایمنی ==="); // تست نشتی leakageTest(); // تست ایزولاسیون isolationTest(); // تست اضافه بار overloadTest(); // تست دمایی thermalTest(); Serial.println("✅ تست ایمنی کامل شد"); } };
🔍 تشخیص خطا و عیبیابی
برنامه تشخیص خودکار دو کاناله:
void autoDiagnoseDualChannel() { Serial.println("=== تشخیص خودکار دو کاناله ==="); // 1. تست LEDها Serial.println("1. تست LEDها:"); testLEDs(); // 2. تست فوتوترانزیستورها Serial.println("\n2. تست فوتوترانزیستورها:"); testPhototransistors(); // 3. تست CTR Serial.println("\n3. تست نسبت انتقال:"); testCTRDual(); // 4. تست ایزولاسیون متقابل Serial.println("\n4. تست ایزولاسیون متقابل:"); testCrossChannelIsolation(); // 5. تست تطابق Serial.println("\n5. تست تطابق کانالها:"); testChannelMatching(); Serial.println("\nتشخیص کامل شد"); generateDiagnosticReport(); } void testCrossChannelIsolation() { Serial.println("تست نشتی بین کانالها:"); bool leakageDetected = false; // روشن کردن کانال 1، بررسی کانال 2 digitalWrite(CH1_INPUT_PIN, HIGH); delayMicroseconds(100); if (digitalRead(CH2_OUTPUT_PIN) == HIGH) { Serial.println("❌ نشتی از کانال 1 به کانال 2"); leakageDetected = true; } digitalWrite(CH1_INPUT_PIN, LOW); delayMicroseconds(100); // روشن کردن کانال 2، بررسی کانال 1 digitalWrite(CH2_INPUT_PIN, HIGH); delayMicroseconds(100); if (digitalRead(CH1_OUTPUT_PIN) == HIGH) { Serial.println("❌ نشتی از کانال 2 به کانال 1"); leakageDetected = true; } digitalWrite(CH2_INPUT_PIN, LOW); if (!leakageDetected) { Serial.println("✅ ایزولاسیون متقابل صحیح است"); } }
🏭 کاربردهای صنعتی ویژه
۱. سیستمهای کنترل صنعتی (PLC):
class IndustrialControlInterface { private: DualChannelOptocoupler inputIsolator; DualChannelOptocoupler outputIsolator; bool inputStates[2]; bool outputStates[2]; public: IndustrialControlInterface( // Input Isolation int in1In, int in1Out, int in2In, int in2Out, // Output Isolation int out1In, int out1Out, int out2In, int out2Out ) : inputIsolator(in1In, in1Out, in2In, in2Out), outputIsolator(out1In, out1Out, out2In, out2Out) { inputStates[0] = inputStates[1] = false; outputStates[0] = outputStates[1] = false; } void readIndustrialInputs() { inputStates[0] = inputIsolator.getChannelOutput(0); inputStates[1] = inputIsolator.getChannelOutput(1); // تشخیص لبه detectEdges(); // فیلتر نویز digitalFilter(); } void writeIndustrialOutputs(bool out1, bool out2) { outputIsolator.setBothChannels(out1, out2); outputStates[0] = out1; outputStates[1] = out2; // مانیتور جریان خروجی monitorOutputCurrents(); } void safetyMonitor() { // مانیتور سلامت رابط static unsigned long lastCheck = 0; if (millis() - lastCheck > 1000) { lastCheck = millis(); checkIsolationIntegrity(); checkThermalStatus(); checkResponseTimes(); } } void emergencyStop() { outputIsolator.setBothChannels(LOW, LOW); Serial.println("🛑 توقف اضطراری صنعتی فعال شد"); } };
۲. سیستمهای قدرت و اینورتر:
class PowerInverterInterface { private: DualChannelOptocoupler gateDrivers[3]; // برای 3 فاز float switchingFrequency; float deadTime; public: PowerInverterInterface(float freq = 20000, float deadTimeUs = 2.0) : switchingFrequency(freq), deadTime(deadTimeUs) { // تنظیمهای اولیه برای درایور گیت 3 فاز } void generatePWM3Phase(float modulationIndex, float frequency) { // تولید PWM سه فاز سینوسی for (int phase = 0; phase < 3; phase++) { float phaseAngle = (2 * PI * phase) / 3.0; generatePhasePWM(phase, modulationIndex, frequency, phaseAngle); } } void generatePhasePWM(int phase, float modulationIndex, float frequency, float phaseAngle) { unsigned long period = 1000000 / switchingFrequency; for (int i = 0; i < 100; i++) { float time = i / (frequency * 100.0); float sineValue = sin(2 * PI * frequency * time + phaseAngle); float duty = 0.5 + 0.5 * modulationIndex * sineValue; unsigned long onTime = period * duty; // High Side gateDrivers[phase].setChannel(0, HIGH); delayMicroseconds(onTime); gateDrivers[phase].setChannel(0, LOW); delayMicroseconds(deadTime); // Low Side gateDrivers[phase].setChannel(1, HIGH); delayMicroseconds(period - onTime - deadTime); gateDrivers[phase].setChannel(1, LOW); delayMicroseconds(deadTime); } } void protectFromShootThrough() { // جلوگیری از شوت-ترو (همزمانی High و Low) for (int phase = 0; phase < 3; phase++) { bool highState = gateDrivers[phase].getChannelOutput(0); bool lowState = gateDrivers[phase].getChannelOutput(1); if (highState && lowState) { Serial.println("🚨 خطر شوت-ترو تشخیص داده شد"); emergencyShutdown(); break; } } } };
📦 ویژگیهای ماژول آماده
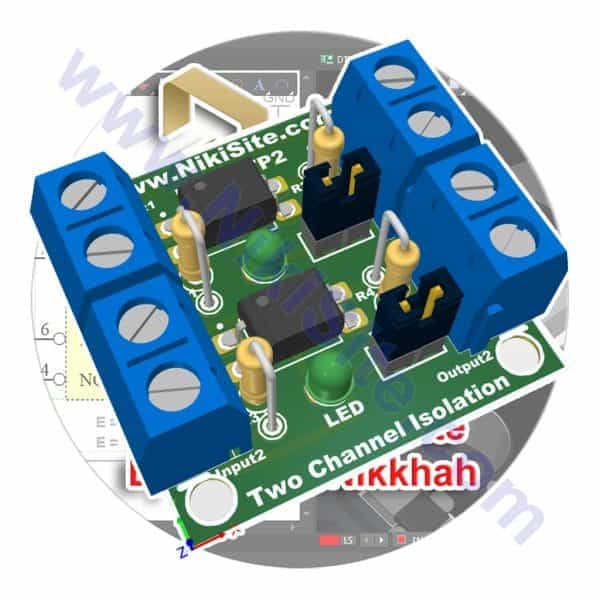
مشخصات ماژول اپتوکوپلر دو حالته:
ابعاد: 25mm × 20mm × 12mm
پایهها: هدر 8 پین 2.54mm
اپتوکوپلر: PC827 یا معادل دو کاناله
مقاومتها:
مقاومتهای LED: 220Ω × 2
مقاومتهای پایه: 10KΩ × 2
خازن فیلتر: 100nF × 2
ولتاژ کاری: 3.3V – 5V
جریان خروجی کل: تا 100mA
ایزولاسیون بین کانالها: 1500Vrms
ایزولاسیون به زمین: 2500Vrms
پکیج حرفهای:
1 عدد ماژول اپتوکوپلر دو حالته
8 عدد پایه هدر طلایی
4 عدد مقاومت اضافی
2 عدد خازن اضافی
راهنمای نصب پیشرفته
دیاگرامهای نمونه مدار
کدهای نمونه کامل آردوینو
🌟 نتیجهگیری
ماژول اپتوکوپلر دو حالته یک راهحل پیشرفته برای کاربردهایی است که نیاز به ایزوله کردن چندین سیگنال به طور همزمان دارند. با دو کانال مستقل و مشخصات تطبیقیافته، این ماژول امکان پیادهسازی سیستمهای کنترلی پیچیده، درایورهای موتور پیشرفته و رابطهای ارتباطی امن را فراهم میکند.
ایزولاسیون دوگانه، کنترل پیشرفته
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.




















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.