








")
")



")
")
")
")
")
")











نقشه ماژول کنترل مادون قرمز 16 کاناله
50,000 تومانهر فایل
16Channel Tiny Infra-Red Remote Controller Module
این ماژول کوچک و کاربردی طوری طراحی گشته بتواند شانزده (16) کلید ریموت کنترل مادون قرمز را دریافت نماید و خروجی مرتبط با آن را بصورت پایدار (Latch) روشن نگه دارد و در مرتب بعد فشردن همان کلید بصورت معکوس عمل و آن را خاموش نماید
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
ماژول کنترل از راه دور مینی مادون قرمز 16 کاناله
16Channel Tiny Infra-Red Remote Controller Module
این ماژول کوچک و کاربردی طوری طراحی گشته بتواند شانزده کلید ریموت کنترل مادون قرمز را دریافت نماید و خروجی مرتبط با آن را بصورت پایدار (Latch) روشن نگه دارد و در مرتب بعد فشردن همان کلید بصورت معکوس عمل و آن را خاموش نماید.
کنترلر بیسیم پیشرفته
📱 کنترل از راه دور مینی مادون قرمز 16 کاناله: فرماندهی هوشمند بیسیم
ماژول کنترل از راه دور مینی مادون قرمز 16 کاناله یک راهحل کامپکت و قدرتمند برای کنترل بیسیم پروژههای الکترونیکی، رباتیک و سیستمهای اتوماسیون است. این ماژول با پشتیبانی از 16 کانال مجزا، امکان کنترل چندین دستگاه را به طور همزمان فراهم میکند.
🎯 ویژگیهای کلیدی
🔌 طراحی مینیاتوری و کاربردی:
ابعاد کوچک: طراحی جمعوجور برای نصب آسان
16 دکمه مستقل: کنترل مجزای 16 عملکرد مختلف
فرستنده مادون قرمز: برد مؤثر تا 10 متر
گیرنده حساس: تشخیص دقیق سیگنالهای IR
⚡ عملکرد پیشرفته:
کدگذاری اختصاصی: جلوگیری از تداخل با دستگاههای دیگر
مصرف برق پایین: مناسب برای پروژههای باتریدار
پاسخ سریع: زمان پاسخ کمتر از 100ms
قابلیت برنامهریزی: تنظیم کدهای دلخواه
📊 مشخصات فنی دقیق
پارامترهای فرستنده (کنترل از راه دور):
ولتاژ کاری: 3V DC (2 باتری قلمی AAA)
جریان مصرف: 15-25mA در حالت ارسال
فرکانس کاری: 38kHz استاندارد
طول موج: 940nm (مادون قرمز)
برد مؤثر: 8-10 متر (در خط دید)
زاویه ارسال: ±30 درجه
ابعاد: 55mm × 35mm × 10mm
وزن: 25 گرم (با باتری)
پارامترهای گیرنده:
ولتاژ کاری: 3.3V – 5V DC
جریان مصرف: 0.8-1.5mA (آمادهبهکار)
فرکانس تشخیص: 38kHz ±1kHz
ولتاژ خروجی: 0V (فعال) – Vcc (غیرفعال)
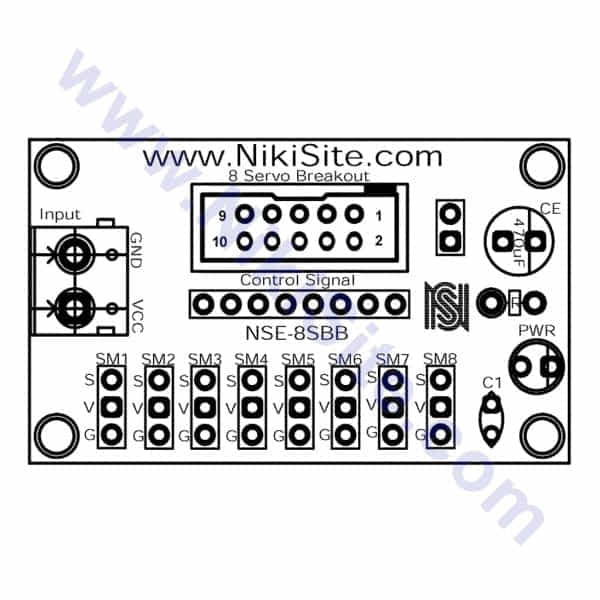
پینهای خروجی: 3 پین (VCC, GND, OUT)
ابعاد ماژول: 18mm × 15mm × 5mm
مشخصات دکمهها:
تعداد دکمهها: 16 دکمه مستقل
چیدمان: ماتریس 4×4
برچسب دکمهها:
ردیف 1: 1, 2, 3, A
ردیف 2: 4, 5, 6, B
ردیف 3: 7, 8, 9, C
ردیف 4: *, 0, #, D
طول عمر مکانیکی: 100,000 فشار
🔧 ساختار و پیکربندی
پیکربندی کنترل از راه دور:
طراحی کنترل از راه دور:
[نمایشگر LCD] (در برخی مدلها)
↓
[ماتریس دکمه 4×4]
↓
[میکروکنترلر رمزگذاری]
↓
[درایور LED مادون قرمز]
↓
[LED فرستنده IR]پینهای ماژول گیرنده:
پیکربندی 3 پین: ┌───────┐ │ ● ● ● │ └───────┘ │ │ │ VCC OUT GND اتصال: - VCC: به 3.3V یا 5V - OUT: به پین دیجیتال میکروکنترلر - GND: به زمین
کدهای هر دکمه (معمولاً به صورت hex):
دکمهها و کدهای نمونه: 1: 0x45 2: 0x46 3: 0x47 A: 0x44 4: 0x40 5: 0x43 6: 0x07 B: 0x15 7: 0x09 8: 0x16 9: 0x19 C: 0x0D *: 0x0C 0: 0x18 #: 0x5E D: 0x52
💻 برنامهنویسی و راهاندازی
اتصال پایه به آردوینو:
// تعریف پایههای ماژول گیرنده IR #define IR_RECEIVER_PIN 11 // پین خروجی گیرنده #define STATUS_LED_PIN 13 // LED نشانگر (اختیاری) // کتابخانه IR (اگر موجود باشد) #include <IRremote.h> // تعریف کدهای دکمهها (مقادیر نمونه) #define IR_BUTTON_1 0x45 #define IR_BUTTON_2 0x46 #define IR_BUTTON_3 0x47 #define IR_BUTTON_4 0x40 #define IR_BUTTON_5 0x43 #define IR_BUTTON_6 0x07 #define IR_BUTTON_7 0x09 #define IR_BUTTON_8 0x16 #define IR_BUTTON_9 0x19 #define IR_BUTTON_0 0x18 #define IR_BUTTON_A 0x44 #define IR_BUTTON_B 0x15 #define IR_BUTTON_C 0x0D #define IR_BUTTON_D 0x52 #define IR_BUTTON_STAR 0x0C #define IR_BUTTON_HASH 0x5E // متغیرهای全局 IRrecv irrecv(IR_RECEIVER_PIN); decode_results results; unsigned long lastCode = 0; unsigned long lastPressTime = 0; void setupIRRemote16CH() { Serial.begin(9600); Serial.println("ماژول کنترل IR 16 کاناله راهاندازی شد"); Serial.println("====================================="); // راهاندازی گیرنده IR irrecv.enableIRIn(); // تنظیم پین LED نشانگر pinMode(STATUS_LED_PIN, OUTPUT); digitalWrite(STATUS_LED_PIN, LOW); // نمایش راهنما printRemoteLayout(); } void loop() { // بررسی دریافت کد IR if (irrecv.decode(&results)) { processIRCode(results.value); irrecv.resume(); // آماده برای دریافت بعدی // نشانگر بصری blinkStatusLED(); } // سایر کارها... delay(10); } void processIRCode(unsigned long code) { // جلوگیری از تکرار سریع if (code == lastCode && (millis() - lastPressTime < 200)) { return; } lastCode = code; lastPressTime = millis(); // شناسایی دکمه فشرده شده String buttonName = decodeButton(code); // نمایش اطلاعات Serial.print("کد دریافت شده: 0x"); Serial.print(code, HEX); Serial.print(" | دکمه: "); Serial.println(buttonName); // اجرای عملکرد مربوطه executeCommand(buttonName, code); } String decodeButton(unsigned long code) { // تطبیق کد با دکمهها switch(code) { case IR_BUTTON_1: return "1"; case IR_BUTTON_2: return "2"; case IR_BUTTON_3: return "3"; case IR_BUTTON_4: return "4"; case IR_BUTTON_5: return "5"; case IR_BUTTON_6: return "6"; case IR_BUTTON_7: return "7"; case IR_BUTTON_8: return "8"; case IR_BUTTON_9: return "9"; case IR_BUTTON_0: return "0"; case IR_BUTTON_A: return "A"; case IR_BUTTON_B: return "B"; case IR_BUTTON_C: return "C"; case IR_BUTTON_D: return "D"; case IR_BUTTON_STAR: return "*"; case IR_BUTTON_HASH: return "#"; default: return "ناشناخته (0x" + String(code, HEX) + ")"; } } void executeCommand(String button, unsigned long code) { // اجرای دستورات بر اساس دکمه فشرده شده Serial.print("اجرای دستور برای دکمه "); Serial.println(button); if (button == "1") { // عملکرد دکمه 1 channel1Control(); } else if (button == "2") { // عملکرد دکمه 2 channel2Control(); } else if (button == "A") { // عملکرد دکمه A functionA(); } else if (button == "*") { // عملکرد ستاره (مثلاً تنظیمات) settingsMenu(); } else if (button == "#") { // عملکرد هشتگ (مثلاً تأیید) confirmAction(); } // میتوانید برای همه 16 دکمه عملکرد تعریف کنید } void blinkStatusLED() { // چشمک زدن LED نشانگر digitalWrite(STATUS_LED_PIN, HIGH); delay(50); digitalWrite(STATUS_LED_PIN, LOW); } void printRemoteLayout() { Serial.println("طرحبندی کنترل از راه دور:"); Serial.println("┌───┬───┬───┬───┐"); Serial.println("│ 1 │ 2 │ 3 │ A │"); Serial.println("├───┼───┼───┼───┤"); Serial.println("│ 4 │ 5 │ 6 │ B │"); Serial.println("├───┼───┼───┼───┤"); Serial.println("│ 7 │ 8 │ 9 │ C │"); Serial.println("├───┼───┼───┼───┤"); Serial.println("│ * │ 0 │ # │ D │"); Serial.println("└───┴───┴───┴───┘"); }
کلاس مدیریت پیشرفته کنترل IR:
class AdvancedIRRemoteController { private: int receiverPin; int statusLED; unsigned long buttonCodes[16]; String buttonNames[16]; bool buttonStates[16]; unsigned long lastPressTime[16]; unsigned long repeatDelay; void (*callbacks[16])(); public: AdvancedIRRemoteController(int pin, int ledPin = -1) { receiverPin = pin; statusLED = ledPin; repeatDelay = 200; // میلیثانیه // راهاندازی گیرنده irrecv = new IRrecv(receiverPin); irrecv->enableIRIn(); // تنظیم LED نشانگر if (statusLED != -1) { pinMode(statusLED, OUTPUT); } // مقداردهی اولیه آرایهها initializeButtonData(); initializeCallbacks(); Serial.println("کنترلر IR پیشرفته راهاندازی شد"); } void initializeButtonData() { // کدهای پیشفرض دکمهها unsigned long defaultCodes[] = { 0x45, 0x46, 0x47, 0x44, // 1,2,3,A 0x40, 0x43, 0x07, 0x15, // 4,5,6,B 0x09, 0x16, 0x19, 0x0D, // 7,8,9,C 0x0C, 0x18, 0x5E, 0x52 // *,0,#,D }; String defaultNames[] = { "1", "2", "3", "A", "4", "5", "6", "B", "7", "8", "9", "C", "*", "0", "#", "D" }; for (int i = 0; i < 16; i++) { buttonCodes[i] = defaultCodes[i]; buttonNames[i] = defaultNames[i]; buttonStates[i] = false; lastPressTime[i] = 0; callbacks[i] = nullptr; } } void update() { decode_results results; if (irrecv->decode(&results)) { processReceivedCode(results.value); irrecv->resume(); // نشانگر بصری indicateReception(); } } void processReceivedCode(unsigned long code) { // جستجوی کد در بین دکمهها for (int i = 0; i < 16; i++) { if (code == buttonCodes[i]) { handleButtonPress(i); return; } } // اگر کد شناخته شده نبود Serial.print("کد ناشناخته: 0x"); Serial.println(code, HEX); } void handleButtonPress(int buttonIndex) { unsigned long currentTime = millis(); // بررسی تکرار سریع if (currentTime - lastPressTime[buttonIndex] < repeatDelay) { return; } // بهروزرسانی زمان آخرین فشار lastPressTime[buttonIndex] = currentTime; // تغییر حالت دکمه (toggle) buttonStates[buttonIndex] = !buttonStates[buttonIndex]; // نمایش اطلاعات Serial.print("دکمه "); Serial.print(buttonNames[buttonIndex]); Serial.print(" فشرده شد. حالت: "); Serial.println(buttonStates[buttonIndex] ? "فعال" : "غیرفعال"); // اجرای تابع callback اگر تعریف شده باشد if (callbacks[buttonIndex] != nullptr) { callbacks[buttonIndex](); } // اجرای عملکرد عمومی executeButtonFunction(buttonIndex); } void setButtonCallback(int buttonIndex, void (*callback)()) { if (buttonIndex >= 0 && buttonIndex < 16) { callbacks[buttonIndex] = callback; Serial.print("تابع برای دکمه "); Serial.print(buttonNames[buttonIndex]); Serial.println(" تنظیم شد"); } } void executeButtonFunction(int buttonIndex) { // عملکردهای مختلف برای دکمهها switch(buttonIndex) { case 0: // دکمه 1 controlChannel(1, buttonStates[buttonIndex]); break; case 1: // دکمه 2 controlChannel(2, buttonStates[buttonIndex]); break; case 2: // دکمه 3 controlChannel(3, buttonStates[buttonIndex]); break; case 3: // دکمه A functionGroupA(buttonStates[buttonIndex]); break; case 12: // دکمه * enterSettingsMode(); break; case 14: // دکمه # confirmSelection(); break; case 15: // دکمه D emergencyStop(); break; default: // عملکرد پیشفرض برای دکمههای عددی if (buttonIndex >= 0 && buttonIndex <= 11) { int channel = buttonIndex + 1; if (channel <= 12) { controlChannel(channel, buttonStates[buttonIndex]); } } break; } } void controlChannel(int channel, bool state) { Serial.print("کانال "); Serial.print(channel); Serial.print(" تنظیم شد به: "); Serial.println(state ? "ON" : "OFF"); // در اینجا میتوانید رله، LED یا سایر دستگاهها را کنترل کنید // digitalWrite(channelPins[channel-1], state ? HIGH : LOW); } void functionGroupA(bool state) { Serial.print("گروه A "); Serial.println(state ? "فعال شد" : "غیرفعال شد"); // کنترل همزمان چند کانال if (state) { // روشن کردن کانالهای 1-4 for (int i = 1; i <= 4; i++) { controlChannel(i, true); } } else { // خاموش کردن کانالهای 1-4 for (int i = 1; i <= 4; i++) { controlChannel(i, false); } } } void enterSettingsMode() { Serial.println("📝 ورود به حالت تنظیمات"); // کد برای حالت تنظیمات } void confirmSelection() { Serial.println("✅ انتخاب تأیید شد"); // کد برای تأیید } void emergencyStop() { Serial.println("🛑 توقف اضطراری فعال شد"); // خاموش کردن همه کانالها for (int i = 1; i <= 16; i++) { controlChannel(i, false); } } void indicateReception() { if (statusLED != -1) { digitalWrite(statusLED, HIGH); delay(20); digitalWrite(statusLED, LOW); } } void setButtonCode(int buttonIndex, unsigned long newCode) { if (buttonIndex >= 0 && buttonIndex < 16) { buttonCodes[buttonIndex] = newCode; Serial.print("کد دکمه "); Serial.print(buttonNames[buttonIndex]); Serial.print(" به 0x"); Serial.println(newCode, HEX); Serial.println("تغییر یافت"); } } void setRepeatDelay(unsigned long delayMs) { repeatDelay = delayMs; Serial.print("تأخیر تکرار به "); Serial.print(delayMs); Serial.println("ms تنظیم شد"); } bool getButtonState(int buttonIndex) { if (buttonIndex >= 0 && buttonIndex < 16) { return buttonStates[buttonIndex]; } return false; } String getButtonName(int buttonIndex) { if (buttonIndex >= 0 && buttonIndex < 16) { return buttonNames[buttonIndex]; } return "نامعتبر"; } void printStatus() { Serial.println("=== وضعیت کنترلر IR ==="); Serial.println("دکمه | حالت | آخرین فشار"); Serial.println("-----|------|------------"); for (int i = 0; i < 16; i++) { Serial.print(" "); Serial.print(buttonNames[i]); Serial.print(" | "); Serial.print(buttonStates[i] ? " ON " : " OFF "); Serial.print(" | "); if (lastPressTime[i] > 0) { unsigned long secondsAgo = (millis() - lastPressTime[i]) / 1000; Serial.print(secondsAgo); Serial.println("s پیش"); } else { Serial.println("هرگز"); } } } void learnMode() { Serial.println("🎓 فعال کردن حالت یادگیری"); Serial.println("لطفاً دکمه مورد نظر را فشار دهید..."); unsigned long startTime = millis(); bool learned = false; while (millis() - startTime < 10000) { // 10 ثانیه زمان decode_results results; if (irrecv->decode(&results)) { Serial.print("کد یاد گرفته شده: 0x"); Serial.println(results.value, HEX); // ذخیره کد برای اولین دکمه خالی for (int i = 0; i < 16; i++) { if (buttonCodes[i] == 0) { buttonCodes[i] = results.value; Serial.print("کد به دکمه "); Serial.print(buttonNames[i]); Serial.println(" اختصاص داده شد"); learned = true; break; } } irrecv->resume(); if (learned) break; } delay(10); } if (learned) { Serial.println("✅ یادگیری موفق"); } else { Serial.println("❌ زمان یادگیری به پایان رسید"); } } };
⚙️ کاربردهای عملی
۱. سیستم کنترل نور ۱۶ کاناله:
class IRLightingControlSystem { private: AdvancedIRRemoteController irController; int relayPins[16]; bool lightStates[16]; String lightNames[16]; public: IRLightingControlSystem(int irPin, int relayPinsArray[16]) : irController(irPin, 13) { // کپی پینهای رله for (int i = 0; i < 16; i++) { relayPins[i] = relayPinsArray[i]; lightStates[i] = false; lightNames[i] = "چراغ " + String(i + 1); // تنظیم پینهای رله pinMode(relayPins[i], OUTPUT); digitalWrite(relayPins[i], LOW); // حالت اولیه خاموش } // تنظیم نامهای خاص برای برخی چراغها lightNames[0] = "چراغ پذیرایی"; lightNames[1] = "چراغ آشپزخانه"; lightNames[2] = "چراغ خواب"; lightNames[3] = "چراغ راهرو"; // تنظیم توابع callback setupCallbacks(); Serial.println("سیستم کنترل نور IR راهاندازی شد"); } void setupCallbacks() { // تنظیم توابع برای دکمهها for (int i = 0; i < 16; i++) { // ایجاد تابع lambda برای هر دکمه irController.setButtonCallback(i, [this, i]() { this->toggleLight(i); }); } // تنظیم توابع خاص برای دکمههای عملیاتی irController.setButtonCallback(12, [this]() { // دکمه * this->allLightsOn(); }); irController.setButtonCallback(14, [this]() { // دکمه # this->allLightsOff(); }); irController.setButtonCallback(15, [this]() { // دکمه D this->emergencyLighting(); }); } void toggleLight(int lightIndex) { if (lightIndex >= 0 && lightIndex < 16) { lightStates[lightIndex] = !lightStates[lightIndex]; digitalWrite(relayPins[lightIndex], lightStates[lightIndex] ? HIGH : LOW); Serial.print(lightNames[lightIndex]); Serial.print(" "); Serial.println(lightStates[lightIndex] ? "روشن شد" : "خاموش شد"); } } void allLightsOn() { Serial.println("💡 روشن کردن همه چراغها"); for (int i = 0; i < 16; i++) { lightStates[i] = true; digitalWrite(relayPins[i], HIGH); } } void allLightsOff() { Serial.println("🌙 خاموش کردن همه چراغها"); for (int i = 0; i < 16; i++) { lightStates[i] = false; digitalWrite(relayPins[i], LOW); } } void emergencyLighting() { Serial.println("🚨 فعال کردن روشنایی اضطراری"); // خاموش کردن همه چراغها allLightsOff(); // روشن کردن فقط چراغهای ضروری int essentialLights[] = {0, 3, 7}; // پذیرایی، راهرو، سرویس بهداشتی for (int i = 0; i < 3; i++) { toggleLight(essentialLights[i]); } } void lightShowPattern() { Serial.println("✨ نمایش الگوی نور"); // الگوی چشمک زدن for (int pattern = 0; pattern < 3; pattern++) { switch(pattern) { case 0: // یکی در میان for (int i = 0; i < 16; i += 2) { toggleLight(i); } delay(500); for (int i = 0; i < 16; i += 2) { toggleLight(i); } break; case 1: // موج for (int i = 0; i < 16; i++) { toggleLight(i); delay(100); toggleLight(i); } break; case 2: // همه با هم allLightsOn(); delay(300); allLightsOff(); break; } delay(300); } } void update() { // بهروزرسانی وضعیت کنترلر IR irController.update(); // سایر عملیات... static unsigned long lastUpdate = 0; if (millis() - lastUpdate > 1000) { lastUpdate = millis(); monitorPowerConsumption(); } } void monitorPowerConsumption() { float totalPower = 0; int lightsOn = 0; for (int i = 0; i < 16; i++) { if (lightStates[i]) { lightsOn++; totalPower += 50; // فرض: هر چراغ 50 وات } } if (lightsOn > 0) { Serial.print("چراغهای روشن: "); Serial.print(lightsOn); Serial.print(" | مصرف کل: "); Serial.print(totalPower); Serial.println("W"); } } void printLightingStatus() { Serial.println("=== وضعیت روشنایی ==="); for (int i = 0; i < 16; i++) { Serial.print(i + 1); Serial.print(". "); Serial.print(lightNames[i]); Serial.print(": "); Serial.println(lightStates[i] ? "✅ روشن" : "❌ خاموش"); } } };
۲. کنترل ربات ۱۶ کاناله:
class IRRobotController { private: AdvancedIRRemoteController irController; int motorPins[4][2]; // 4 موتور، هر کدام 2 پین (جهت و PWM) int servoPins[4]; // 4 سروو موتور int speed; int currentMode; // 0: دستی, 1: نیمه خودکار, 2: خودکار public: IRRobotController(int irPin) : irController(irPin) { speed = 150; // سرعت پیشفرض (0-255) currentMode = 0; // تنظیم پینهای موتور (مثال) motorPins[0][0] = 2; motorPins[0][1] = 3; // موتور چپ motorPins[1][0] = 4; motorPins[1][1] = 5; // موتور راست motorPins[2][0] = 6; motorPins[2][1] = 7; // موتور بازو motorPins[3][0] = 8; motorPins[3][1] = 9; // موتور گیره // تنظیم پینهای سروو servoPins[0] = 10; // سروو گردن servoPins[1] = 11; // سروو شانه servoPins[2] = 12; // سروو آرنج servoPins[3] = 13; // سروو مچ // تنظیم پینها initializePins(); // تنظیم توابع کنترل setupControlFunctions(); Serial.println("کنترلر ربات IR راهاندازی شد"); Serial.println("حالت: دستی"); } void initializePins() { // تنظیم پینهای موتور for (int i = 0; i < 4; i++) { for (int j = 0; j < 2; j++) { pinMode(motorPins[i][j], OUTPUT); digitalWrite(motorPins[i][j], LOW); } } // تنظیم پینهای سروو for (int i = 0; i < 4; i++) { pinMode(servoPins[i], OUTPUT); } } void setupControlFunctions() { // حرکت ربات irController.setButtonCallback(2, [this]() { // دکمه 3: جلو this->moveForward(); }); irController.setButtonCallback(8, [this]() { // دکمه 9: عقب this->moveBackward(); }); irController.setButtonCallback(4, [this]() { // دکمه 5: چرخش چپ this->turnLeft(); }); irController.setButtonCallback(6, [this]() { // دکمه 7: چرخش راست this->turnRight(); }); irController.setButtonCallback(5, [this]() { // دکمه 6: توقف this->stopRobot(); }); // کنترل سرعت irController.setButtonCallback(0, [this]() { // دکمه 1: کاهش سرعت this->decreaseSpeed(); }); irController.setButtonCallback(1, [this]() { // دکمه 2: افزایش سرعت this->increaseSpeed(); }); // کنترل سرووها irController.setButtonCallback(10, [this]() { // دکمه 9 (بازو بالا) this->moveArmUp(); }); irController.setButtonCallback(11, [this]() { // دکمه C (بازو پایین) this->moveArmDown(); }); // حالتهای عملیاتی irController.setButtonCallback(12, [this]() { // دکمه *: تغییر حالت this->changeMode(); }); irController.setButtonCallback(15, [this]() { // دکمه D: توقف اضطراری this->emergencyStop(); }); } void moveForward() { if (currentMode == 0) { // فقط در حالت دستی Serial.println("🔼 حرکت به جلو"); // کنترل موتورهای چپ و راست analogWrite(motorPins[0][0], speed); // موتور چپ جلو digitalWrite(motorPins[0][1], LOW); analogWrite(motorPins[1][0], speed); // موتور راست جلو digitalWrite(motorPins[1][1], LOW); } } void moveBackward() { if (currentMode == 0) { Serial.println("🔽 حرکت به عقب"); analogWrite(motorPins[0][1], speed); // موتور چپ عقب digitalWrite(motorPins[0][0], LOW); analogWrite(motorPins[1][1], speed); // موتور راست عقب digitalWrite(motorPins[1][0], LOW); } } void turnLeft() { if (currentMode == 0) { Serial.println("↪️ چرخش به چپ"); // موتور راست جلو، موتور چپ عقب analogWrite(motorPins[1][0], speed); digitalWrite(motorPins[1][1], LOW); analogWrite(motorPins[0][1], speed); digitalWrite(motorPins[0][0], LOW); } } void turnRight() { if (currentMode == 0) { Serial.println("↩️ چرخش به راست"); // موتور چپ جلو، موتور راست عقب analogWrite(motorPins[0][0], speed); digitalWrite(motorPins[0][1], LOW); analogWrite(motorPins[1][1], speed); digitalWrite(motorPins[1][0], LOW); } } void stopRobot() { Serial.println("⏹️ توقف ربات"); for (int i = 0; i < 2; i++) { // فقط موتورهای حرکت digitalWrite(motorPins[i][0], LOW); digitalWrite(motorPins[i][1], LOW); } } void increaseSpeed() { speed = constrain(speed + 20, 0, 255); Serial.print("سرعت افزایش یافت: "); Serial.println(speed); } void decreaseSpeed() { speed = constrain(speed - 20, 0, 255); Serial.print("سرعت کاهش یافت: "); Serial.println(speed); } void moveArmUp() { Serial.println("🔼 حرکت بازو به بالا"); // کنترل سروو بازو // analogWrite(servoPins[2], angle++); } void moveArmDown() { Serial.println("🔽 حرکت بازو به پایین"); // کنترل سروو بازو // analogWrite(servoPins[2], angle--); } void changeMode() { currentMode = (currentMode + 1) % 3; Serial.print("تغییر حالت به: "); switch(currentMode) { case 0: Serial.println("دستی"); break; case 1: Serial.println("نیمه خودکار"); break; case 2: Serial.println("خودکار"); break; } if (currentMode == 2) { startAutonomousMode(); } } void startAutonomousMode() { Serial.println("🚀 شروع حالت خودکار"); // الگوریتمهای حرکت خودکار } void emergencyStop() { Serial.println("🚨 توقف اضطراری ربات"); // خاموش کردن همه موتورها for (int i = 0; i < 4; i++) { digitalWrite(motorPins[i][0], LOW); digitalWrite(motorPins[i][1], LOW); } // برگشت به حالت دستی currentMode = 0; } void update() { irController.update(); // در حالت خودکار، تصمیمگیری مستقل if (currentMode == 2) { autonomousDecisionMaking(); } } void autonomousDecisionMaking() { // الگوریتمهای هوش مصنوعی ساده static unsigned long lastDecision = 0; if (millis() - lastDecision > 1000) { lastDecision = millis(); // تصمیمگیری بر اساس سنسورها (شبیهسازی) int obstacleDistance = random(0, 100); // شبیهسازی فاصله if (obstacleDistance < 20) { Serial.println("⚠️ مانع نزدیک - تغییر مسیر"); avoidObstacle(); } else { moveForward(); } } } void avoidObstacle() { // الگوریتم اجتناب از مانع stopRobot(); delay(500); turnRight(); delay(300); stopRobot(); } void printRobotStatus() { Serial.println("=== وضعیت ربات ==="); Serial.print("حالت: "); switch(currentMode) { case 0: Serial.println("دستی"); break; case 1: Serial.println("نیمه خودکار"); break; case 2: Serial.println("خودکار"); break; } Serial.print("سرعت: "); Serial.println(speed); Serial.print("موتورها: "); for (int i = 0; i < 4; i++) { bool dir1 = digitalRead(motorPins[i][0]); bool dir2 = digitalRead(motorPins[i][1]); Serial.print("M"); Serial.print(i+1); Serial.print(": "); if (dir1 && !dir2) Serial.print("جلو "); else if (!dir1 && dir2) Serial.print("عقب "); else Serial.print("توقف "); } Serial.println(); } };
۳. سیستم صوتی چند کاناله:
class IRAudioSystemController { private: AdvancedIRRemoteController irController; int volumeLevel; int bassLevel; int trebleLevel; int currentSource; // 0: AUX, 1: Bluetooth, 2: Radio bool powerState; public: IRAudioSystemController(int irPin) : irController(irPin) { volumeLevel = 50; // 0-100 bassLevel = 0; // -10 to +10 trebleLevel = 0; // -10 to +10 currentSource = 0; powerState = false; setupAudioControls(); Serial.println("سیستم صوتی IR راهاندازی شد"); } void setupAudioControls() { // کنترل قدرت irController.setButtonCallback(0, [this]() { // دکمه 1: روشن/خاموش this->togglePower(); }); // کنترل صدا irController.setButtonCallback(1, [this]() { // دکمه 2: افزایش صدا this->increaseVolume(); }); irController.setButtonCallback(2, [this]() { // دکمه 3: کاهش صدا this->decreaseVolume(); }); // کنترل بیس و تریبل irController.setButtonCallback(4, [this]() { // دکمه 5: افزایش بیس this->increaseBass(); }); irController.setButtonCallback(5, [this]() { // دکمه 6: کاهش بیس this->decreaseBass(); }); irController.setButtonCallback(6, [this]() { // دکمه 7: افزایش تریبل this->increaseTreble(); }); irController.setButtonCallback(7, [this]() { // دکمه 8: کاهش تریبل this->decreaseTreble(); }); // انتخاب منبع irController.setButtonCallback(8, [this]() { // دکمه 9: AUX this->selectSource(0); }); irController.setButtonCallback(9, [this]() { // دکمه 0: Bluetooth this->selectSource(1); }); irController.setButtonCallback(10, [this]() { // دکمه A: Radio this->selectSource(2); }); // کنترل پخش irController.setButtonCallback(3, [this]() { // دکمه 4: پخش/مکث this->playPause(); }); irController.setButtonCallback(11, [this]() { // دکمه B: آهنگ بعدی this->nextTrack(); }); irController.setButtonCallback(12, [this]() { // دکمه C: آهنگ قبلی this->previousTrack(); }); // اکولایزر irController.setButtonCallback(13, [this]() { // دکمه *: تغییر preset this->changeEqualizerPreset(); }); // حالت سکوت irController.setButtonCallback(14, [this]() { // دکمه #: سکوت this->toggleMute(); }); } void togglePower() { powerState = !powerState; Serial.print("سیستم "); Serial.println(powerState ? "روشن شد" : "خاموش شد"); if (powerState) { // اجرای مراحل راهاندازی initializeAudioSystem(); } else { // خاموش کردن همه بخشها shutdownAudioSystem(); } } void initializeAudioSystem() { Serial.println("🎵 راهاندازی سیستم صوتی..."); // شبیهسازی راهاندازی for (int i = 0; i < 3; i++) { Serial.print("."); delay(300); } Serial.println(); // تنظیمات اولیه volumeLevel = 30; currentSource = 0; Serial.println("✅ سیستم صوتی آماده است"); printAudioStatus(); } void shutdownAudioSystem() { Serial.println("🔄 خاموش کردن سیستم صوتی..."); // کاهش تدریجی صدا for (int i = volumeLevel; i > 0; i -= 10) { volumeLevel = i; Serial.print("صدا: "); Serial.println(volumeLevel); delay(100); } volumeLevel = 0; Serial.println("✅ سیستم خاموش شد"); } void increaseVolume() { if (powerState) { volumeLevel = constrain(volumeLevel + 5, 0, 100); Serial.print("🔊 افزایش صدا به: "); Serial.println(volumeLevel); } } void decreaseVolume() { if (powerState) { volumeLevel = constrain(volumeLevel - 5, 0, 100); Serial.print("🔉 کاهش صدا به: "); Serial.println(volumeLevel); } } void increaseBass() { if (powerState) { bassLevel = constrain(bassLevel + 1, -10, 10); Serial.print("🎵 افزایش بیس به: "); Serial.println(bassLevel); } } void decreaseBass() { if (powerState) { bassLevel = constrain(bassLevel - 1, -10, 10); Serial.print("🎵 کاهش بیس به: "); Serial.println(bassLevel); } } void increaseTreble() { if (powerState) { trebleLevel = constrain(trebleLevel + 1, -10, 10); Serial.print("🎶 افزایش تریبل به: "); Serial.println(trebleLevel); } } void decreaseTreble() { if (powerState) { trebleLevel = constrain(trebleLevel - 1, -10, 10); Serial.print("🎶 کاهش تریبل به: "); Serial.println(trebleLevel); } } void selectSource(int source) { if (powerState && source >= 0 && source < 3) { currentSource = source; Serial.print("منبع انتخاب شد: "); switch(source) { case 0: Serial.println("AUX"); break; case 1: Serial.println("Bluetooth"); break; case 2: Serial.println("Radio"); break; } } } void playPause() { if (powerState) { static bool playing = false; playing = !playing; Serial.println(playing ? "▶️ پخش" : "⏸️ مکث"); } } void nextTrack() { if (powerState) { Serial.println("⏭️ آهنگ بعدی"); // کد تغییر آهنگ } } void previousTrack() { if (powerState) { Serial.println("⏮️ آهنگ قبلی"); // کد تغییر آهنگ } } void changeEqualizerPreset() { if (powerState) { static int preset = 0; preset = (preset + 1) % 5; Serial.print("🎛️ preset اکولایزر: "); switch(preset) { case 0: Serial.println("نرمال"); break; case 1: Serial.println("پاپ"); break; case 2: Serial.println("راک"); break; case 3: Serial.println("جاز"); break; case 4: Serial.println("کلاسیک"); break; } } } void toggleMute() { if (powerState) { static bool muted = false; muted = !muted; if (muted) { Serial.println("🔇 حالت سکوت فعال"); } else { Serial.print("🔊 حالت سکوت غیرفعال - صدا: "); Serial.println(volumeLevel); } } } void update() { irController.update(); // بهروزرسانی وضعیت سیستم static unsigned long lastUpdate = 0; if (millis() - lastUpdate > 5000) { lastUpdate = millis(); systemHealthCheck(); } } void systemHealthCheck() { if (powerState) { Serial.println("🔍 بررسی سلامت سیستم صوتی..."); // شبیهسازی بررسی bool allOK = true; // بررسی سطح صدا if (volumeLevel > 90) { Serial.println("⚠️ هشدار: سطح صدا بسیار بالا"); allOK = false; } // بررسی تنظیمات اکولایزر if (abs(bassLevel) > 8 || abs(trebleLevel) > 8) { Serial.println("⚠️ هشدار: تنظیمات اکولایزر شدید"); allOK = false; } if (allOK) { Serial.println("✅ سیستم در وضعیت مطلوب"); } } } void printAudioStatus() { if (powerState) { Serial.println("=== وضعیت سیستم صوتی ==="); Serial.print("منبع: "); switch(currentSource) { case 0: Serial.println("AUX"); break; case 1: Serial.println("Bluetooth"); break; case 2: Serial.println("FM Radio"); break; } Serial.print("صدا: "); Serial.print(volumeLevel); Serial.print("% | بیس: "); Serial.print(bassLevel); Serial.print(" | تریبل: "); Serial.println(trebleLevel); // نمایش گرافیکی صدا Serial.print("سطح صدا: ["); int bars = volumeLevel / 10; for (int i = 0; i < 10; i++) { Serial.print(i < bars ? "█" : "░"); } Serial.println("]"); } else { Serial.println("سیستم صوتی خاموش است"); } } };
🔧 نصب و راهاندازی
مراحل نصب ماژول گیرنده:
void setupIRReceiverModule() { Serial.println("=== راهنمای نصب ماژول گیرنده IR ==="); // 1. اتصال سیمها Serial.println("1. اتصال سیمهای ماژول:"); Serial.println(" VCC → 5V (یا 3.3V)"); Serial.println(" GND → Ground"); Serial.println(" OUT → پین دیجیتال (مثلاً پین 11)"); // 2. موقعیتدهی گیرنده Serial.println("\n2. موقعیتدهی گیرنده:"); Serial.println(" - رو به کنترل از راه دور"); Serial.println(" - دور از منابع نور مستقیم"); Serial.println(" - فاصله مناسب (1-8 متر)"); // 3. تست اولیه Serial.println("\n3. تست اولیه:"); testIRReceiverInstallation(); // 4. تنظیم کنترل از راه دور Serial.println("\n4. تنظیم کنترل از راه دور:"); setupRemoteControl(); } void testIRReceiverInstallation() { Serial.println("در حال تست گیرنده IR..."); Serial.println("لطفاً دکمهای از کنترل از راه دور را فشار دهید"); unsigned long startTime = millis(); bool received = false; while (millis() - startTime < 10000) { // 10 ثانیه فرصت if (checkIRSignal()) { received = true; Serial.println("✅ گیرنده به درستی کار میکند"); break; } delay(100); } if (!received) { Serial.println("❌ گیرنده IR پاسخ نمیدهد"); Serial.println("علل احتمالی:"); Serial.println("- اتصالات را بررسی کنید"); Serial.println("- باتری کنترل از راه دور"); Serial.println("- مانع بین کنترل و گیرنده"); } }
کالیبراسیون کدهای دکمه:
void calibrateIRRemote() { Serial.println("=== کالیبراسیون کنترل از راه دور ==="); Serial.println("این روال کدهای IR دکمهها را یاد میگیرد"); unsigned long learnedCodes[16] = {0}; String buttonLabels[] = { "1", "2", "3", "A", "4", "5", "6", "B", "7", "8", "9", "C", "*", "0", "#", "D" }; for (int i = 0; i < 16; i++) { Serial.print("\nلطفاً دکمه "); Serial.print(buttonLabels[i]); Serial.println(" را فشار دهید..."); unsigned long code = learnSingleButton(); if (code != 0) { learnedCodes[i] = code; Serial.print("✅ دکمه "); Serial.print(buttonLabels[i]); Serial.print(": 0x"); Serial.println(code, HEX); } else { Serial.print("❌ دریافت کد برای دکمه "); Serial.println(buttonLabels[i]); } delay(1000); } // نمایش نتایج Serial.println("\n=== نتایج کالیبراسیون ==="); for (int i = 0; i < 16; i++) { if (learnedCodes[i] != 0) { Serial.print("#define BUTTON_"); Serial.print(buttonLabels[i]); Serial.print(" 0x"); Serial.print(learnedCodes[i], HEX); Serial.println(""); } } }
⚡ بهینهسازی و نکات فنی
افزایش برد و حساسیت:
void optimizeIRRange() { Serial.println("=== بهینهسازی برد IR ==="); // 1. استفاده از LED اضافی Serial.println("1. افزایش قدرت فرستنده:"); Serial.println(" - اضافه کردن LED IR موازی"); Serial.println(" - استفاده از مقاومت مناسب"); // 2. بهبود گیرنده Serial.println("\n2. بهبود گیرنده:"); Serial.println(" - استفاده از فیلتر نوری"); Serial.println(" - کاهش نویز محیطی"); Serial.println(" - موقعیتدهی صحیح"); // 3. تنظیمات نرمافزاری Serial.println("\n3. تنظیمات نرمافزاری:"); Serial.println(" - افزایش timeout دریافت"); Serial.println(" - فیلتر کدهای نامعتبر"); Serial.println(" - سیستم تکرار خودکار"); } void increaseTransmitterPower() { // مدار افزایش قدرت فرستنده Serial.println("مدار تقویت کننده IR:"); Serial.println("باتری 3V → مقاومت 10Ω → LED IR × 2 (موازی)"); Serial.println("⚠️ توجه: جریان کل نباید از 100mA تجاوز کند"); }
حل مشکلات رایج:
void troubleshootIRProblems() { Serial.println("=== عیبیابی مشکلات IR ==="); // جدول مشکلات و راهحلها String problems[][2] = { {"عدم پاسخ کنترل", "بررسی باتریها، خط دید، فاصله"}, {"پاسخ متناوب", "کاهش نویز، تغییر فرکانس، کالیبراسیون"}, {"تداخل با دستگاههای دیگر", "تغییر کد، استفاده از کدگذاری اختصاصی"}, {"برد کم", "تمیز کردن لنز، افزایش قدرت، بهبود گیرنده"}, {"پاسخ نادرست دکمهها", "کالیبراسیون مجدد، بررسی کدها"} }; for (int i = 0; i < 5; i++) { Serial.print(i + 1); Serial.print(". مشکل: "); Serial.print(problems[i][0]); Serial.print(" - راهحل: "); Serial.println(problems[i][1]); } }
📦 مشخصات کامل محصول
ویژگیهای کنترل از راه دور:
ابعاد: 90mm × 40mm × 15mm
وزن: 38 گرم (با باتری)
باتری: 2×AAA (3V)
LED نشانگر: قرمز (هنگام ارسال)
جنس بدنه: پلاستیک ABS
رنگ: معمولاً مشکی
طول عمر باتری: 6-12 ماه (با استفاده معمولی)
ویژگیهای ماژول گیرنده:
ماژول: VS1838B یا TSOP38238
ولتاژ کاری: 2.7V – 5.5V
جریان آمادهبهکار: 0.35mA
پهنای باند: ±1kHz در 38kHz
دمای کاری: -25°C تا +85°C
فاصله نصب: توصیه شده 20mm از PCB
گارانتی و پشتیبانی:
- پشتیبانی فنی رایگان
بهروزرسانی نرمافزار
کتابخانههای آماده آردوینو
نمونه کدهای کامل
🌟 نتیجهگیری
ماژول کنترل از راه دور مینی مادون قرمز 16 کاناله یک راهحل ایدهآل برای پروژههای کنترل بیسیم است. با ترکیب سادگی استفاده، قابلیت اطمینان بالا و قیمت مناسب، این ماژول میتواند در طیف گستردهای از کاربردها از پروژههای آموزشی تا سیستمهای اتوماسیون خانگی استفاده شود.
کنترل هوشمند، عملکرد مطمئن
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) | |
|---|---|
| نوع مدار | |
| نوع فایل | |
| لایه های مدارچاپی | |
| برند |
نیکی سایت |
| کشور سازنده |
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.






















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.