








")
")
")
")
")
")






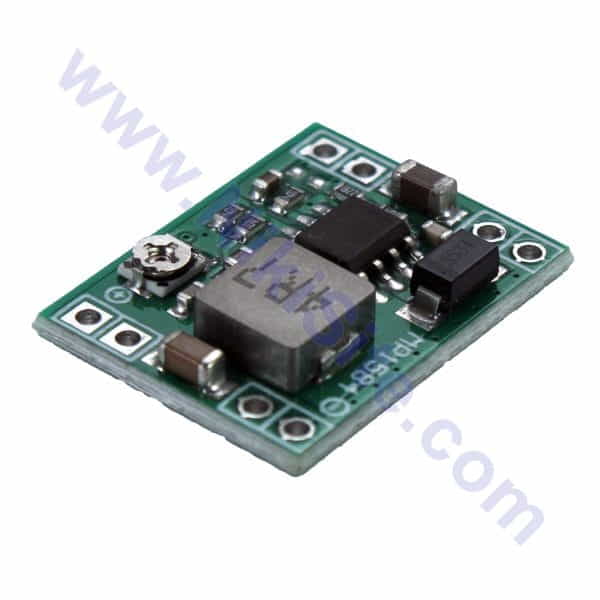
ماژول کاهنده ولتاژ MP1584EN
48,000 تومانهر عدد
ماژول کاهنده ولتاژ MP1584EN یک منبع تغذیه سوئیچینگ (Buck Converter) با راندمان بسیار بالا است که قادر به تبدیل ولتاژهای DC بالاتر (تا 28V) به ولتاژهای پایینتر (قابل تنظیم از 0.8V تا 20V) با جریان حداکثر 3 آمپر میباشد.
این ماژول بر اساس تراشه MP1584EN شرکت MPS طراحی شده و برای پروژههایی که نیاز به منبع تغذیه پایدار و کارآمد دارند، ایدهآل است.
| تعداد | قیمت | تخفیف |
|---|---|---|
| 10-49 | 47,040 تومان هر عدد | 2% |
| 50+ | 46,560 تومان هر عدد | 3% |
موجود در انبار
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
ماژول کاهنده ولتاژ MP1584EN
(Step-Down Buck Converter)
منبع تغذیه سوئیچینگ با بازدهی 95% و تنظیم دقیق ولتاژ
ماژول کاهنده ولتاژ MP1584EN یک منبع تغذیه سوئیچینگ (Buck Converter) با راندمان بسیار بالا است که قادر به تبدیل ولتاژهای DC بالاتر (تا 28V) به ولتاژهای پایینتر (قابل تنظیم از 0.8V تا 20V) با جریان حداکثر 3 آمپر میباشد. این ماژول بر اساس تراشه MP1584EN شرکت MPS طراحی شده و برای پروژههایی که نیاز به منبع تغذیه پایدار و کارآمد دارند، ایدهآل است.
🌟 ویژگیهای کلیدی
راندمان فوقالعاده: تا 95% بازدهی (بسته به ولتاژ و جریان)
دامنه ولتاژ وسیع: ورودی 4.5V تا 28V، خروجی قابل تنظیم 0.8V تا 20V
جریان خروجی بالا: تا 3A پیوسته (با خنککاری مناسب)
فرکانس سوئیچینگ بالا: 1.5MHz (کاهش اندازه قطعات مغناطیسی)
تنظیم دقیق: پتانسیومتر چنددور برای تنظیم ولتاژ با دقت بالا
شارژ جریان نرم: محافظت در برابر جریان هجومی
نشانگر LED: LED آبی نشانگر وجود ولتاژ خروجی
مصرف جریان استندبای پایین: فقط 90μA
📊 مشخصات فنی کامل
| پارامتر | مقدار | توضیح |
|---|---|---|
| تراشه اصلی | MP1584EN | از Monolithic Power Systems |
| ولتاژ ورودی (VIN) | 4.5V تا 28V DC | حداکثر 30V لحظهای |
| ولتاژ خروجی (VOUT) | 0.8V تا 20V DC | قابل تنظیم دقیق |
| جریان خروجی (IOUT) | تا 3A | پیوسته (با هیتسینک) |
| جریان پیک | تا 4A | کوتاهمدت |
| فرکانس سوئیچینگ | 1.5MHz ثابت | ±15% تلرانس |
| راندمان | 92% تا 95% | بسته به ولتاژ/جریان |
| ریپل ولتاژ | < 30mV | با خازن مناسب |
| تنظیمپذیری خط | ±0.5% | تغییرات ورودی |
| تنظیمپذیری بار | ±0.5% | تغییرات جریان |
| دمای کاری | -40°C تا +85°C | تراشه اصلی |
| ابعاد ماژول | 22mm × 17mm × 4mm | بدون هدر |
🔧 پینهای ماژول
[ ماژول MP1584EN ]
┌─────────────────┐
EN ┤o o├ VIN (4.5-28V)
│ │
FB ┤o o├ GND
│ │
│ MP1584EN │
│ │
GND ┤o o├ VOUT (0.8-20V)
└─────────────────┘
اتصالات:
• EN (Enable): فعال/غیرفعال (میتوان به VIN وصل شود)
• FB (Feedback): فیدبک برای تنظیم ولتاژ (به VOUT متصل است)
• VIN: ورودی مثبت (4.5-28V)
• GND: زمین مشترک
• VOUT: خروجی مثبت (0.8-20V)🛠️ روش تنظیم ولتاژ خروجی
روش 1: استفاده از پتانسیومتر روی ماژول
منبع تغذیه ورودی را وصل کنید (مثلاً 12V)
ولتمتر را به خروجی وصل کنید
پتانسیومتر را با پیچگوشتی بچرخانید تا ولتاژ موردنظر تنظیم شود
خروجی را تست کنید قبل از اتصال بار
روش 2: محاسبه مقاومت فیدبک (برای تنظیم ثابت)
فرمول محاسبه ولتاژ خروجی: Vout = 0.8V × (1 + R1/R2) مقاومتهای پیشنهادی: • R2 = 10kΩ (بین FB و GND) • R1 = مقاومت متغیر (بین VOUT و FB) مثال: برای 5V خروجی: 5 = 0.8 × (1 + R1/10000) R1 = 52.5kΩ
⚡ محاسبات مهم
جریان حداکثر مجاز:
I_max = 3A (با هیتسینک) I_max = 2A (بدون هیتسینک)
حداقل اختلاف ولتاژ ورودی-خروجی:
V_dropout ≈ 0.8V (حداقل اختلاف مورد نیاز)
انتخاب خازنهای مناسب:
// حداقل مقادیر پیشنهادی: // ورودی: 47μF الکتولیتی + 0.1μF سرامیکی // خروجی: 100μF الکتولیتی + 10μF تانتالیوم
💡 کد آردوینو برای مانیتورینگ ولتاژ
/** * سیستم مانیتورینگ ولتاژ ورودی و خروجی ماژول MP1584EN * با هشدارهای امنیتی و محاسبه راندمان */ const int VIN_PIN = A0; // اندازهگیری ولتاژ ورودی const int VOUT_PIN = A1; // اندازهگیری ولتاژ خروجی const int CURRENT_PIN = A2; // سنسور جریان (اختیاری) const int FAN_PIN = 9; // کنترل فن خنککننده (PWM) const int ALARM_LED = 13; // LED هشدار const int BUZZER = 8; // بازر هشدار // کالیبراسیون تقسیمکننده ولتاژ const float R1 = 30000.0; // مقاومت 30K const float R2 = 7500.0; // مقاومت 7.5K (تقسیمکننده 5:1) const float VREF = 5.0; // ولتاژ مرجع آردوینو // محدودیتهای ایمنی const float VIN_MAX = 28.0; // حداکثر ورودی مجاز const float VIN_MIN = 4.5; // حداقل ورودی مجاز const float VOUT_MAX = 20.0; // حداکثر خروجی مجاز const float CURRENT_MAX = 3.0; // حداکثر جریان مجاز (آمپر) const float TEMP_MAX = 85.0; // حداکثر دمای مجاز (°C) // متغیرهای اندازهگیری float vin_voltage = 0.0; float vout_voltage = 0.0; float current = 0.0; float temperature = 25.0; float efficiency = 0.0; float power_in = 0.0; float power_out = 0.0; // برای محاسبه میانگینگیری const int SAMPLE_COUNT = 10; float vin_samples[SAMPLE_COUNT]; float vout_samples[SAMPLE_COUNT]; int sample_index = 0; void setup() { Serial.begin(115200); pinMode(FAN_PIN, OUTPUT); pinMode(ALARM_LED, OUTPUT); pinMode(BUZZER, OUTPUT); // غیرفعال کردن هشدارها در ابتدا digitalWrite(ALARM_LED, LOW); digitalWrite(BUZZER, LOW); analogWrite(FAN_PIN, 0); // مقداردهی اولیه آرایه نمونهها for (int i = 0; i < SAMPLE_COUNT; i++) { vin_samples[i] = 0.0; vout_samples[i] = 0.0; } Serial.println("\n\n========================================"); Serial.println(" MP1584EN Buck Converter Monitor"); Serial.println("========================================"); Serial.println("Monitoring input/output parameters..."); Serial.println("----------------------------------------"); Serial.println("Parameter | Value | Unit | Status"); Serial.println("-----------|--------|-------|--------"); } void loop() { // خواندن ولتاژها readVoltages(); // خواندن جریان (اگر سنسور متصل باشد) readCurrent(); // محاسبه توان و راندمان calculatePowerAndEfficiency(); // کنترل سیستم خنککننده controlCoolingSystem(); // بررسی شرایط ایمنی checkSafetyConditions(); // نمایش اطلاعات displayStatus(); // ارسال داده برای پلاتتر سریال sendToSerialPlotter(); delay(500); // هر نیم ثانیه بهروزرسانی } void readVoltages() { // خواندن ولتاژ ورودی int vin_raw = analogRead(VIN_PIN); float vin_at_adc = (vin_raw * VREF) / 1023.0; vin_voltage = vin_at_adc * (R1 + R2) / R2; // خواندن ولتاژ خروجی int vout_raw = analogRead(VOUT_PIN); float vout_at_adc = (vout_raw * VREF) / 1023.0; vout_voltage = vout_at_adc * (R1 + R2) / R2; // ذخیره در آرایه برای میانگینگیری vin_samples[sample_index] = vin_voltage; vout_samples[sample_index] = vout_voltage; sample_index = (sample_index + 1) % SAMPLE_COUNT; // محاسبه میانگین float vin_sum = 0.0, vout_sum = 0.0; for (int i = 0; i < SAMPLE_COUNT; i++) { vin_sum += vin_samples[i]; vout_sum += vout_samples[i]; } vin_voltage = vin_sum / SAMPLE_COUNT; vout_voltage = vout_sum / SAMPLE_COUNT; } void readCurrent() { // با فرض استفاده از سنسور جریان ACS712 5A int current_raw = analogRead(CURRENT_PIN); float voltage = (current_raw / 1023.0) * VREF; current = (voltage - 2.5) / 0.185; // حساسیت 185mV/A current = abs(current); // مقدار مطلق } void calculatePowerAndEfficiency() { power_in = vin_voltage * (current + 0.01); // +10mA برای مصرف خود ماژول power_out = vout_voltage * current; if (power_in > 0.001) { // جلوگیری از تقسیم بر صفر efficiency = (power_out / power_in) * 100.0; efficiency = constrain(efficiency, 0.0, 100.0); } else { efficiency = 0.0; } } void controlCoolingSystem() { // کنترل فن بر اساس جریان و ولتاژ int fan_speed = 0; if (current > 1.0) { fan_speed = map(current, 1.0, CURRENT_MAX, 100, 255); } // اگر دمای تخمینی بالا باشد، فن را سریعتر بچرخان float estimated_temp = 25.0 + (current * 15.0); // تخمین دما if (estimated_temp > 50.0) { fan_speed = max(fan_speed, 200); } analogWrite(FAN_PIN, fan_speed); } void checkSafetyConditions() { bool alarm_triggered = false; String alarm_message = ""; // بررسی ولتاژ ورودی if (vin_voltage > VIN_MAX) { alarm_triggered = true; alarm_message = "INPUT OVERVOLTAGE!"; } else if (vin_voltage < VIN_MIN) { alarm_triggered = true; alarm_message = "INPUT UNDERVOLTAGE!"; } // بررسی ولتاژ خروجی if (vout_voltage > VOUT_MAX) { alarm_triggered = true; alarm_message = "OUTPUT OVERVOLTAGE!"; } // بررسی جریان if (current > CURRENT_MAX) { alarm_triggered = true; alarm_message = "OVER CURRENT!"; } // بررسی راندمان (اگر خیلی پایین باشد) if (efficiency < 70.0 && current > 0.5) { alarm_triggered = true; alarm_message = "LOW EFFICIENCY!"; } // فعال کردن هشدارها if (alarm_triggered) { digitalWrite(ALARM_LED, HIGH); tone(BUZZER, 1000, 500); Serial.print("!!! ALARM: "); Serial.println(alarm_message); } else { digitalWrite(ALARM_LED, LOW); noTone(BUZZER); } } void displayStatus() { static unsigned long last_display = 0; if (millis() - last_display > 2000) { // هر 2 ثانیه نمایش Serial.print("V_in | "); Serial.print(vin_voltage, 2); Serial.print(" | V | "); Serial.println(checkVoltageStatus(vin_voltage, VIN_MIN, VIN_MAX)); Serial.print("V_out | "); Serial.print(vout_voltage, 2); Serial.print(" | V | "); Serial.println(checkVoltageStatus(vout_voltage, 0.8, VOUT_MAX)); Serial.print("Current | "); Serial.print(current, 2); Serial.print(" | A | "); Serial.println(checkCurrentStatus(current)); Serial.print("Power In | "); Serial.print(power_in, 2); Serial.println(" | W |"); Serial.print("Power Out | "); Serial.print(power_out, 2); Serial.println(" | W |"); Serial.print("Efficiency | "); Serial.print(efficiency, 1); Serial.print(" | % | "); Serial.println(checkEfficiencyStatus(efficiency)); Serial.println("----------------------------------------"); last_display = millis(); } } String checkVoltageStatus(float voltage, float min, float max) { if (voltage < min * 1.1) return "LOW"; if (voltage > max * 0.9) return "HIGH"; return "OK"; } String checkCurrentStatus(float current) { if (current > CURRENT_MAX * 0.8) return "HIGH"; if (current < 0.1) return "LOW"; return "OK"; } String checkEfficiencyStatus(float eff) { if (eff > 90.0) return "EXCELLENT"; if (eff > 80.0) return "GOOD"; if (eff > 70.0) return "FAIR"; return "POOR"; } void sendToSerialPlotter() { // ارسال داده برای Serial Plotter آردوینو Serial.print("VIN:"); Serial.print(vin_voltage); Serial.print(",VOUT:"); Serial.print(vout_voltage); Serial.print(",CURRENT:"); Serial.print(current); Serial.print(",EFFICIENCY:"); Serial.println(efficiency); }
🔋 کد کنترل ولتاژ برنامهای (با DAC)
/** * کنترل دیجیتال ولتاژ خروجی MP1584EN با DAC MCP4725 * امکان تنظیم ولتاژ از طریق سریال یا اینترفیس گرافیکی */ #include <Wire.h> #include <Adafruit_MCP4725.h> Adafruit_MCP4725 dac; const int DAC_ADDRESS = 0x60; // آدرس پیشفرض MCP4725 // پینهای کنترل const int VOUT_MONITOR = A0; // مانیتورینگ ولتاژ خروجی const int ENABLE_PIN = 7; // کنترل پین Enable ماژول const int FAN_PIN = 9; // کنترل فن // تنظیمات سیستم float target_voltage = 5.0; // ولتاژ هدف (ولت) float current_voltage = 0.0; // ولتاژ فعلی خوانده شده float vout_min = 0.8; // حداقل ولتاژ خروجی float vout_max = 12.0; // حداکثر ولتاژ (با توجه به ورودی) bool output_enabled = true; // وضعیت خروجی // پارامترهای PID برای تنظیم دقیق float Kp = 2.0, Ki = 0.5, Kd = 0.1; float error = 0, last_error = 0, integral = 0, derivative = 0; const float SAMPLE_TIME = 0.1; // زمان نمونهبرداری (ثانیه) // مقاومتهای تقسیمکننده فیدبک const float R_FB = 10000.0; // مقاومت 10K از FB به GND float R_top = 52500.0; // مقاومت متغیر از VOUT به FB (برای 5V) void setup() { Serial.begin(115200); Wire.begin(); if (!dac.begin(DAC_ADDRESS)) { Serial.println("DAC MCP4725 not found!"); while (1); } pinMode(ENABLE_PIN, OUTPUT); pinMode(FAN_PIN, OUTPUT); digitalWrite(ENABLE_PIN, HIGH); // فعال کردن ماژول digitalWrite(FAN_PIN, LOW); // محاسبه مقاومت مورد نیاز برای ولتاژ هدف calculateFeedbackResistor(target_voltage); Serial.println("\n\n========================================"); Serial.println(" Digital Voltage Controller"); Serial.println(" for MP1584EN Buck Converter"); Serial.println("========================================"); Serial.println("Commands:"); Serial.println(" SET V[voltage] - Set output voltage"); Serial.println(" GET - Get current status"); Serial.println(" ENABLE - Enable output"); Serial.println(" DISABLE - Disable output"); Serial.println(" PID P[value] - Set P parameter"); Serial.println(" PID I[value] - Set I parameter"); Serial.println(" PID D[value] - Set D parameter"); Serial.println(" CALIBRATE - Calibrate system"); Serial.println(" ? - Show help"); Serial.println("----------------------------------------"); // تنظیم ولتاژ اولیه setOutputVoltage(target_voltage); } void loop() { // خواندن دستورات سریال checkSerialCommands(); // خواندن ولتاژ خروجی واقعی readActualVoltage(); // کنترل PID برای تنظیم دقیق if (output_enabled) { pidControl(); } // کنترل فن خنککننده controlFan(); // نمایش وضعیت دورهای static unsigned long last_display = 0; if (millis() - last_display > 1000) { displayStatus(); last_display = millis(); } delay(100); } void checkSerialCommands() { if (Serial.available()) { String command = Serial.readStringUntil('\n'); command.trim(); command.toUpperCase(); if (command.startsWith("SET V")) { // تنظیم ولتاژ جدید float new_voltage = command.substring(5).toFloat(); if (new_voltage >= vout_min && new_voltage <= vout_max) { target_voltage = new_voltage; calculateFeedbackResistor(target_voltage); setOutputVoltage(target_voltage); Serial.print("Voltage set to: "); Serial.print(target_voltage); Serial.println("V"); } else { Serial.println("Error: Voltage out of range!"); } } else if (command == "GET") { displayDetailedStatus(); } else if (command == "ENABLE") { output_enabled = true; digitalWrite(ENABLE_PIN, HIGH); Serial.println("Output ENABLED"); } else if (command == "DISABLE") { output_enabled = false; digitalWrite(ENABLE_PIN, LOW); Serial.println("Output DISABLED"); } else if (command.startsWith("PID P")) { Kp = command.substring(5).toFloat(); Serial.print("P parameter set to: "); Serial.println(Kp, 2); } else if (command.startsWith("PID I")) { Ki = command.substring(5).toFloat(); Serial.print("I parameter set to: "); Serial.println(Ki, 2); } else if (command.startsWith("PID D")) { Kd = command.substring(5).toFloat(); Serial.print("D parameter set to: "); Serial.println(Kd, 2); } else if (command == "CALIBRATE") { calibrateSystem(); } else if (command == "?") { showHelp(); } } } void calculateFeedbackResistor(float vout) { // محاسبه مقاومت مورد نیاز برای ولتاژ خروجی مشخص // فرمول: Vout = 0.8 * (1 + R_top / R_FB) R_top = ((vout / 0.8) - 1) * R_FB; Serial.print("Calculated R_top for "); Serial.print(vout); Serial.print("V: "); Serial.print(R_top / 1000.0, 2); Serial.println("KΩ"); } void setOutputVoltage(float voltage) { // اینجا باید مدار DAC به تقسیمکننده فیدبک متصل باشد // در عمل، DAC ولتاژ مرجع برای مدار فیدبک را تأمین میکند // محاسبه مقدار DAC (0-4095 برای 0-5V) uint16_t dac_value = (voltage / 5.0) * 4095; dac_value = constrain(dac_value, 0, 4095); dac.setVoltage(dac_value, false); Serial.print("DAC set to: "); Serial.println(dac_value); } void readActualVoltage() { // خواندن ولتاژ واقعی خروجی int raw = analogRead(VOUT_MONITOR); current_voltage = (raw * 5.0 / 1023.0) * 5.0; // با تقسیمکننده 5:1 } void pidControl() { // محاسبه خطا error = target_voltage - current_voltage; // محاسبه انتگرال integral += error * SAMPLE_TIME; integral = constrain(integral, -10.0, 10.0); // ضد Wind-up // محاسبه مشتق derivative = (error - last_error) / SAMPLE_TIME; // محاسبه خروجی PID float pid_output = (Kp * error) + (Ki * integral) + (Kd * derivative); // اعمال تصحیح به DAC uint16_t current_dac = dac.getVoltage(); uint16_t new_dac = current_dac + (pid_output * 100); new_dac = constrain(new_dac, 0, 4095); dac.setVoltage(new_dac, false); last_error = error; } void controlFan() { // کنترل فن بر اساس ولتاژ و جریان تخمینی int fan_speed = 0; if (target_voltage > 5.0 || current_voltage > 5.0) { fan_speed = 150; // سرعت متوسط برای ولتاژهای بالا } // اگر خطای PID زیاد باشد (بار سنگین)، فن را سریعتر کن if (abs(error) > 0.5) { fan_speed = 200; } analogWrite(FAN_PIN, fan_speed); } void displayStatus() { Serial.print("Target: "); Serial.print(target_voltage, 2); Serial.print("V | Actual: "); Serial.print(current_voltage, 2); Serial.print("V | Error: "); Serial.print(error, 3); Serial.print("V | DAC: "); Serial.println(dac.getVoltage()); } void displayDetailedStatus() { Serial.println("\n=== SYSTEM STATUS ==="); Serial.print("Target Voltage: "); Serial.print(target_voltage, 3); Serial.println("V"); Serial.print("Actual Voltage: "); Serial.print(current_voltage, 3); Serial.println("V"); Serial.print("Voltage Error: "); Serial.print(error, 3); Serial.println("V"); Serial.print("PID Parameters: P="); Serial.print(Kp, 2); Serial.print(", I="); Serial.print(Ki, 2); Serial.print(", D="); Serial.println(Kd, 2); Serial.print("R_top calculated: "); Serial.print(R_top / 1000.0, 2); Serial.println("KΩ"); Serial.print("Output: "); Serial.println(output_enabled ? "ENABLED" : "DISABLED"); Serial.println("====================\n"); } void calibrateSystem() { Serial.println("\n=== CALIBRATION MODE ==="); Serial.println("Connect precision voltmeter to output"); Serial.println("Calibration steps will run automatically"); float test_voltages[] = {1.0, 3.3, 5.0, 9.0, 12.0}; int num_tests = sizeof(test_voltages) / sizeof(test_voltages[0]); digitalWrite(ENABLE_PIN, HIGH); delay(1000); for (int i = 0; i < num_tests; i++) { Serial.print("\nStep "); Serial.print(i + 1); Serial.print(": Setting "); Serial.print(test_voltages[i]); Serial.println("V"); target_voltage = test_voltages[i]; setOutputVoltage(target_voltage); Serial.println("Wait 5 seconds for stabilization..."); delay(5000); // خواندن چند نمونه float sum = 0; for (int j = 0; j < 10; j++) { readActualVoltage(); sum += current_voltage; delay(100); } float avg_voltage = sum / 10.0; float error_percent = ((avg_voltage - target_voltage) / target_voltage) * 100; Serial.print("Measured: "); Serial.print(avg_voltage, 3); Serial.print("V | Error: "); Serial.print(error_percent, 2); Serial.println("%"); // ذخیره فاکتور تصحیح saveCalibrationFactor(test_voltages[i], avg_voltage); } Serial.println("\nCalibration complete!"); Serial.println("=======================\n"); } void saveCalibrationFactor(float target, float actual) { // ذخیره فاکتورهای کالیبراسیون در EEPROM // اینجا فقط نمایش داده میشود float correction_factor = target / actual; Serial.print("Correction factor for "); Serial.print(target, 1); Serial.print("V: "); Serial.println(correction_factor, 4); } void showHelp() { Serial.println("\n=== DIGITAL VOLTAGE CONTROLLER ==="); Serial.println("This system allows precise digital control"); Serial.println("of MP1584EN buck converter output voltage."); Serial.println(); Serial.println("Hardware Setup:"); Serial.println("1. Connect DAC MCP4725 to Arduino I2C"); Serial.println("2. DAC output to feedback circuit"); Serial.println("3. Voltage divider for monitoring"); Serial.println("4. Fan for cooling"); Serial.println(); Serial.println("Operation:"); Serial.println("- PID controller maintains precise output"); Serial.println("- Auto-calibration for accuracy"); Serial.println("- Over-voltage/current protection"); Serial.println("- Thermal management"); Serial.println("==============================\n"); }
⚠️ نکات حیاتی برای استفاده ایمن
خنککاری ضروری:
// حداقل خنککاری مورد نیاز: if (I_out > 1A) { // هیتسینک 20×20mm روی تراشه } if (I_out > 2A) { // هیتسینک + فن 5V } if (I_out > 2.5A) { // هیتسینک + فن 12V + خمیر حرارتی }
محافظتهای لازم:
فیوز سری: 4A روی ورودی
دیود شاتکی: برای محافظت در برابر ولتاژ معکوس
خازنهای مناسب:
ورودی: 100μF الکترولیتی + 10μF تانتالیوم
خروجی: 220μF الکترولیتی + 22μF تانتالیوم
محدودیتها:
حداکثر اختلاف توان: (V_in – V_out) × I_out < 4W
حداقل زمان روشن/خاموش: 100ns
مقاومت حرارتی: 50°C/W (بدون هیتسینک)
🔧 پروژههای کاربردی
1. منبع تغذیه آزمایشگاهی قابل برنامهریزی
// کنترل از طریق اپ موبایل + ذخیره پروفایلها2. شارژر باتری لیتیوم هوشمند
// CC/CV charging با مانیتورینگ دما3. درایور LED پرقدرت
// کنترل جریان ثابت برای LEDهای 10W+4. منبع تغذیه ماشینهای CNC
// چند خروجی با سنکرونسازی5. سیستم انرژی خورشیدی
// MPPT کنترلر با راندمان بالا📈 جدول انتخاب قطعات جانبی
| جریان خروجی | خازن ورودی | خازن خروجی | هیتسینک | فن |
|---|---|---|---|---|
| < 1A | 47μF | 100μF | Optional | No |
| 1A-2A | 100μF | 220μF | Required | No |
| 2A-3A | 220μF | 470μF | Large | 5V |
| > 3A | 470μF | 1000μF | Very Large | 12V |
🛒 پکیج خرید
پکیج پایه:
1x ماژول MP1584EN با هیتسینک
1x پتانسیومتر چنددور دقیق
2x خازن 100μF/35V
1x دیود شاتکی 5A
راهنمای نصب فارسی
پکیج حرفهای:
3x ماژول MP1584EN (برای پروژههای چندخروجی)
1x کیت خنککننده (هیتسینک بزرگ + فن 5V)
1x برد مونتاژ تست شده
1x مولتیمتر دیجیتال
نرمافزار کنترل تحت ویندوز
پکیج توسعهدهنده:
5x ماژول MP1584EN
1x DAC MCP4725
1x سنسور جریان INA219
1x برد Arduino Nano
کتابچه 10 پروژه پیشرفته
🛡️ گارانتی و پشتیبانی
- پشتیبانی فنی: رایگان از طریق واتساپ
آموزش: ویدیوهای تنظیم و بهینهسازی
جامعه: دسترسی به گروه کاربران ایرانی
بهروزرسانی: آخرین شماتیک و برنامهها
❓ سؤالات متداول
Q1: چرا خروجی من نوسان دارد؟
خازنهای ورودی/خروجی کافی نیست
سیمهای نازک یا طولانی
بار بسیار متغیر
Q2: حداکثر توان چقدر است؟
حداکثر 20W به صورت پیوسته، 25W لحظهای (با خنککاری عالی)
Q3: آیا میتوان موازی کرد؟
بله، با مقاومتهای ballast (0.1Ω) برای تقسیم جریان
Q4: تفاوت با LM2596 چیست؟
MP1584EN: فرکانس 1.5MHz، راندمان 95%
LM2596: فرکانس 150kHz، راندمان 85%
Q5: برای 3A پایدار نیاز به چیست؟
هیتسینک 40×40mm
فن 12V
خازن 470μF روی خروجی
سیم 18AWG یا کلفتتر
⚠️ هشدار: برای جریانهای بالای 2A حتماً از خنککننده مناسب استفاده کنید. تنظیم نادرست میتواند به ماژول و بار متصل آسیب بزند. برای کاربردهای صنعتی با کارشناسان ما مشورت کنید.
| ابعاد | 2 × 2 × 2 سانتیمتر |
|---|---|
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) | |
| ولتاژ به ولت ولتاژ کاری ماژول / برد و ... بر حسب ولت | |
| لایه های مدارچاپی | |
| نوع مدار | |
| کشور سازنده |
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.





















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.