



 ترانزیستورها
ترانزیستورها خازنها
خازنها دیودها
دیودها رگولاتورها
رگولاتورها مقاومتها
مقاومتها کریستال و اسیلاتور
کریستال و اسیلاتور مدارات مجتمع
مدارات مجتمع ابزارها
ابزارها تجهیزات
تجهیزات تجهیزات لحیمکاری
تجهیزات لحیمکاری مولتیمتر و ابزار اندازهگیری
مولتیمتر و ابزار اندازهگیری منبع تغذیه و باتری
منبع تغذیه و باتری تستر
تسترماژول سوئیچ 15A PWM با MOSFET Logic-Level
کنترلر قدرتمند جریان بالا
⚡ ماژول سوئیچ 15A PWM: کنترل هوشمند بارهای سنگین با سیگنال کمتوان
ماژول سوئیچ 15A PWM یک راهحل حرفهای برای کنترل بارهای الکتریکی سنگین با استفاده از سیگنالهای کمتوان است. این ماژول با بهرهگیری از MOSFET منطقسطحی (Logic-Level) امکان کنترل مستقیم با میکروکنترلرهای 3.3V و 5V را فراهم میکند.
🎯 ویژگیهای کلیدی
🔋 قدرت و کارایی:
-
جریان پیوسته: 15 آمپر در دمای محیط
-
جریان پیک: تا 30 آمپر (کوتاهمدت)
-
ولتاژ کاری: 5V تا 30V DC
-
راندمان بالا: تا 98% در جریان نامی
🎛️ کنترل پیشرفته:
-
PWM فرکانس بالا: سازگار با تا 25 کیلوهرتز
-
Logic-Level Gate: فعال با 3.3V/5V مستقیم
-
ایزولاسیون سیگنال: جداسازی کنترل از بخش قدرت
-
حفاظت کامل: دیود هرزگرد داخلی
📊 مشخصات فنی دقیق
پارامترهای الکتریکی:
-
MOSFET: N-Channel Logic-Level
-
مقاومت روشن (Rds(on)): < 10 میلیاهم @ Vgs=5V
-
ولتاژ درین-سورس (Vds): 30V حداکثر
-
جریان گیت: < 100nA (نشت)
-
ولتاژ گیت آستانه (Vgs(th)): 1.5V – 2.5V
پارامترهای PWM:
-
فرکانس کاری: 0Hz – 25kHz
-
چرخه کاری: 0% – 100%
-
زمان پاسخ: روشن < 100ns، خاموش < 150ns
-
لبه PWM: قابل تنظیم (جلو/عقب)
مشخصات فیزیکی:
-
ابعاد PCB: 45mm × 25mm × 15mm
-
ترمینالها: پیچی 5mm (ورودی، خروجی، کنترل)
-
هیتسینک: آلومینیوم آنادایز شده
-
جرم: 28 گرم
-
عایق کاری: 500V بین بخشها
🛠 طراحی و ساختار
مدار قدرت:
طرح کلی مدار:
منبع تغذیه (5-30V) → فیوز ←→ MOSFET ←→ بار
↓ ↓
خازنهای درایور
فیلتر گیت
↓
سیگنال PWM (3.3V/5V)
قطعات کلیدی:
-
MOSFET: IRFZ44N یا معادل Logic-Level
-
درایور گیت: TC4427 یا معادل
-
خازنهای فیلتر: 100µF الکترولیت + 100nF سرامیکی
-
دیود هرزگرد: Schottky 40V/20A
-
فیوز: قابل تعویض 15A
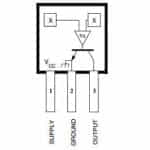
🔌 پیکربندی پایهها
ترمینالهای ماژول:
پیکربندی ترمینال:
┌─────────────────────┐
│ V+ ──┬── Load+ │
│ │ │
│ فیوز 15A │
│ │ │
│ GND ──┴── Load- │
└─────────────────────┘
کنترل: Signal, GND
جدول اتصالات:
| ترمینال | رنگ سیم | توضیح | اتصال به |
|---|---|---|---|
| V+ | قرمز | تغذیه مثبت | منبع 5-30V |
| GND | سیاه | زمین مشترک | منبع و کنترلر |
| Load+ | زرد | خروجی مثبت | بار (+) |
| Load- | آبی | خروجی منفی | بار (-) |
| Signal | سبز | PWM ورودی | پین میکروکنترلر |
| GND-Sig | سیاه | زمین سیگنال | GND کنترلر |
💻 برنامهنویسی و کنترل
کنترل پایه با آردوینو:
// کنترل ساده ماژول PWM 15A #define PWM_PIN 9 // پین PWM (با قابلیت PWM آردوینو) #define ENABLE_PIN 8 // پین فعالسازی (اختیاری) void setupPWMController() { Serial.begin(115200); pinMode(PWM_PIN, OUTPUT); pinMode(ENABLE_PIN, OUTPUT); // تنظیم فرکانس PWM برای پین 9 و 10 آردوینو Uno // 31250Hz برای عملکرد بهتر موتورها TCCR1B = TCCR1B & 0b11111000 | 0x01; Serial.println("ماژول سوئیچ PWM 15A راهاندازی شد"); Serial.println("فرکانس PWM: 31.25kHz"); } void loop() { // کنترل سرعت موتور DC controlMotorSpeed(); // کنترل روشنایی LED پرقدرت controlLEDBrightness(); // کنترل المنت حرارتی controlHeater(); } // مثال: کنترل سرعت موتور void controlMotorSpeed() { for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle += 5) { analogWrite(PWM_PIN, dutyCycle); Serial.print("چرخه کاری: "); Serial.print((dutyCycle * 100) / 255); Serial.println("%"); delay(100); } for (int dutyCycle = 255; dutyCycle >= 0; dutyCycle -= 5) { analogWrite(PWM_PIN, dutyCycle); delay(100); } }
کلاس کنترل پیشرفته:
class HighPowerPWMController { private: int pwmPin; int enablePin; int frequency; int currentDuty; bool enabled; public: HighPowerPWMController(int pin, int enPin = -1, int freq = 25000) { pwmPin = pin; enablePin = enPin; frequency = freq; currentDuty = 0; enabled = false; pinMode(pwmPin, OUTPUT); if (enablePin != -1) { pinMode(enablePin, OUTPUT); disable(); // ابتدا غیرفعال } setupPWMFrequency(); } void setupPWMFrequency() { // تنظیم فرکانس PWM برای آردوینو if (pwmPin == 9 || pwmPin == 10) { // تایمر 1 TCCR1B = TCCR1B & 0b11111000 | 0x01; // 31.25kHz } else if (pwmPin == 3 || pwmPin == 11) { // تایمر 2 TCCR2B = TCCR2B & 0b11111000 | 0x01; // 31.25kHz } Serial.print("فرکانس PWM تنظیم شد: "); Serial.print(frequency); Serial.println("Hz"); } void enable() { if (enablePin != -1) { digitalWrite(enablePin, HIGH); enabled = true; Serial.println("ماژول فعال شد"); } } void disable() { if (enablePin != -1) { digitalWrite(enablePin, LOW); enabled = false; analogWrite(pwmPin, 0); Serial.println("ماژول غیرفعال شد"); } } void setDutyCycle(int duty) { duty = constrain(duty, 0, 255); currentDuty = duty; if (enabled || enablePin == -1) { analogWrite(pwmPin, duty); // مانیتورینگ static unsigned long lastPrint = 0; if (millis() - lastPrint > 1000) { lastPrint = millis(); Serial.print("Duty Cycle: "); Serial.print((duty * 100) / 255); Serial.println("%"); } } } void setDutyPercent(float percent) { percent = constrain(percent, 0, 100); int duty = (percent * 255) / 100; setDutyCycle(duty); } void rampUp(int targetDuty, int durationMs) { int steps = abs(targetDuty - currentDuty); int stepTime = durationMs / steps; for (int i = currentDuty; i != targetDuty; i += (targetDuty > currentDuty ? 1 : -1)) { setDutyCycle(i); delay(stepTime); } setDutyCycle(targetDuty); } void softStart(int targetPercent, int rampTime = 2000) { enable(); Serial.println("Soft Start آغاز شد"); rampUp((targetPercent * 255) / 100, rampTime); Serial.println("Soft Start تکمیل شد"); } void softStop(int rampTime = 1000) { Serial.println("Soft Stop آغاز شد"); rampUp(0, rampTime); disable(); Serial.println("Soft Stop تکمیل شد"); } int getCurrentDuty() { return currentDuty; } float getCurrentPercent() { return (currentDuty * 100.0) / 255.0; } bool isEnabled() { return enabled; } }; // استفاده از کلاس HighPowerPWMController motorController(9, 8); // PWM پین 9، Enable پین 8 void setup() { Serial.begin(115200); motorController.softStart(50); // شروع نرم تا 50% } void loop() { // کنترل با پتانسیومتر int potValue = analogRead(A0); int dutyValue = map(potValue, 0, 1023, 0, 255); motorController.setDutyCycle(dutyValue); delay(50); }
⚙️ کاربردهای عملی
۱. کنترل سرعت موتور DC:
void motorSpeedControl() { HighPowerPWMController motor(9); // الگوی کنترل سرعت int speedPattern[] = {0, 25, 50, 75, 100, 75, 50, 25, 0}; int patternSize = sizeof(speedPattern) / sizeof(speedPattern[0]); for (int i = 0; i < patternSize; i++) { motor.setDutyPercent(speedPattern[i]); Serial.print("سرعت موتور: "); Serial.print(speedPattern[i]); Serial.println("%"); // مانیتور جریان float current = readCurrentSensor(); Serial.print("جریان: "); Serial.print(current); Serial.println("A"); // حفاظت از اضافه بار if (current > 10.0) { // آستانه 10A Serial.println("⚠️ اضافه بار! توقف موتور"); motor.softStop(); delay(5000); motor.softStart(speedPattern[i]); } delay(2000); } }
۲. دیمر LED پرقدرت:
class HighPowerLEDDriver { private: HighPowerPWMController pwm; int maxCurrent; float currentLimit; public: HighPowerLEDDriver(int pin, int maxA = 5) : pwm(pin), maxCurrent(maxA) { currentLimit = maxA * 0.8; // 80% حاشیه ایمنی } void setBrightness(float percent) { // منحنی غیرخطی برای درک بصری بهتر روشنایی float correctedPercent = pow(percent / 100.0, 2.2) * 100; pwm.setDutyPercent(correctedPercent); // مانیتورینگ float current = readLEDCurrent(); if (current > currentLimit) { Serial.print("⚠️ جریان LED بالا: "); Serial.print(current); Serial.println("A - کاهش روشنایی"); reduceBrightness(); } } void fadeIn(int duration) { for (int i = 0; i <= 100; i++) { setBrightness(i); delay(duration / 100); } } void fadeOut(int duration) { for (int i = 100; i >= 0; i--) { setBrightness(i); delay(duration / 100); } } void strobe(int frequencyHz, int durationMs) { unsigned long startTime = millis(); unsigned long halfPeriod = 1000 / (frequencyHz * 2); while (millis() - startTime < durationMs) { setBrightness(100); delay(halfPeriod); setBrightness(0); delay(halfPeriod); } setBrightness(0); } };
۳. کنترل دمای المنت حرارتی:
class HeaterController { private: HighPowerPWMController pwm; float targetTemp; float currentTemp; float kp, ki, kd; // ضرایب PID public: HeaterController(int pin, float kp = 2.0, float ki = 0.5, float kd = 1.0) : pwm(pin), kp(kp), ki(ki), kd(kd) { targetTemp = 25.0; // دمای اتاق پیشفرض } void setTemperature(float temp) { targetTemp = constrain(temp, 0.0, 200.0); Serial.print("دمای هدف تنظیم شد: "); Serial.print(targetTemp); Serial.println("°C"); } void updatePID() { currentTemp = readTemperature(); static float integral = 0; static float lastError = 0; float error = targetTemp - currentTemp; integral += error; float derivative = error - lastError; // محاسبه خروجی PID float output = (kp * error) + (ki * integral) + (kd * derivative); // تبدیل به duty cycle int duty = constrain(map(output, -100, 100, 0, 255), 0, 255); pwm.setDutyCycle(duty); lastError = error; // لاگ اطلاعات static unsigned long lastLog = 0; if (millis() - lastLog > 1000) { lastLog = millis(); Serial.print("دما: "); Serial.print(currentTemp); Serial.print("°C | Duty: "); Serial.print((duty * 100) / 255); Serial.println("%"); } } void safetyCheck() { if (currentTemp > targetTemp + 20.0) { Serial.println("🚨 دمای بیش از حد! خاموش کردن"); pwm.setDutyPercent(0); triggerAlarm(); } float current = readCurrent(); if (current > 12.0) { // بیشتر از 12A Serial.println("🚨 جریان بیش از حد! خاموش کردن"); pwm.setDutyPercent(0); } } };
🔧 نصب و راهاندازی ایمن
مراحل نصب:
-
اتصال تغذیه:
-
منبع 5-30V DC به ترمینال V+ و GND
-
فیوز 15A را بررسی کنید
-
اتصال صحیح قطبها را تأیید کنید
-
-
اتصال بار:
-
بار به ترمینال Load+ و Load-
-
حداکثر جریان 15A رعایت شود
-
از سیم با مقطع مناسب استفاده کنید (حداقل 1.5mm²)
-
-
اتصال کنترل:
-
سیگنال PWM به ترمینال Signal
-
زمین سیگنال به GND-Sig
-
ولتاژ سیگنال: 3.3V یا 5V
-
نکات ایمنی:
void safetyChecks() { // بررسیهای اولیه قبل از راهاندازی Serial.println("=== بررسی ایمنی ماژول ==="); // 1. بررسی اتصال کوتاه if (checkShortCircuit()) { Serial.println("❌ اتصال کوتاه تشخیص داده شد"); return; } // 2. بررسی قطبیت if (!checkPolarity()) { Serial.println("❌ قطبیت اشتباه است"); return; } // 3. بررسی دمای ماژول float temp = readModuleTemperature(); if (temp > 60.0) { Serial.println("⚠️ دمای ماژول بالا است"); Serial.print("دمای فعلی: "); Serial.print(temp); Serial.println("°C"); } // 4. بررسی جریان اولیه float initialCurrent = readCurrent(); if (initialCurrent > 1.0) { // بیشتر از 1A در حالت خاموش Serial.println("⚠️ جریان نشتی غیرعادی"); } Serial.println("✅ تمام بررسیهای ایمنی passed"); }
📈 مانیتورینگ و دیاگنوستیک
سیستم مانیتورینگ پیشرفته:
class PowerMonitor { private: int currentPin; int voltagePin; int tempPin; public: PowerMonitor(int currPin, int voltPin, int tempPin) : currentPin(currPin), voltagePin(voltPin), tempPin(tempPin) { pinMode(currentPin, INPUT); pinMode(voltagePin, INPUT); pinMode(tempPin, INPUT); } float readCurrent() { // خواندن از سنسور جریان (ACS712 یا معادل) int raw = analogRead(currentPin); float voltage = (raw * 5.0) / 1023.0; float current = (voltage - 2.5) / 0.185; // برای ACS712 20A return abs(current); } float readVoltage() { int raw = analogRead(voltagePin); float voltage = (raw * 5.0) / 1023.0 * 6.6; // تقسیم ولتاژ 6.6:1 return voltage; } float readTemperature() { int raw = analogRead(tempPin); float voltage = (raw * 5.0) / 1023.0; float temp = (voltage - 0.5) * 100; // برای LM35 return temp; } void logStatus() { static unsigned long lastLog = 0; if (millis() - lastLog > 1000) { lastLog = millis(); float current = readCurrent(); float voltage = readVoltage(); float temp = readTemperature(); float power = current * voltage; Serial.println("=== وضعیت ماژول PWM ==="); Serial.print("ولتاژ: "); Serial.print(voltage, 1); Serial.print("V | جریان: "); Serial.print(current, 2); Serial.print("A | توان: "); Serial.print(power, 1); Serial.print("W | دما: "); Serial.print(temp, 1); Serial.println("°C"); // هشدارها if (current > 15.0) Serial.println("⚠️ جریان بیش از حد مجاز"); if (temp > 75.0) Serial.println("⚠️ دمای بحرانی"); if (voltage > 30.0) Serial.println("⚠️ ولتاژ بیش از حد"); } } };
⚠️ ملاحظات ایمنی و حفاظتی
محدودیتهای کاری:
-
حداکثر جریان پیوسته: 15A @ 25°C
-
حداکثر جریان پیک: 30A برای 10ms
-
حداکثر ولتاژ: 30V DC
-
حداکثر دمای کاری: 125°C (کاسهای MOSFET)
حفاظتهای لازم:
-
فیوز: 15A سریععملکرد
-
خنککننده: هیتسینک مناسب
-
تهویه: فضای کافی برای گردش هوا
-
عایق: جلوگیری از اتصال بدنه
هشدارهای مهم:
void emergencyProcedures() { // اقدامات اضطراری Serial.println("🚨 اقدامات اضطراری فعال شد"); // 1. قطع فوری خروجی digitalWrite(PWM_PIN, LOW); digitalWrite(ENABLE_PIN, LOW); // 2. ذخیره وضعیت saveErrorState(); // 3. فعال کردن آلارم triggerEmergencyAlarm(); // 4. خنککاری اضطراری (اگر موجود باشد) activateCoolingSystem(); // 5. گزارش خطا sendEmergencyReport(); }
🔍 عیبیابی و نگهداری
مشکلات رایج و راهحل:
| نشانه | علت احتمالی | راهحل |
|---|---|---|
| ماژول گرم میشود | جریان بیش از حد یا خنککننده ناکافی | کاهش بار، بررسی هیتسینک |
| خروجی کار نمیکند | سیگنال PWM ضعیف یا قطعی | بررسی اتصالات، تست سیگنال |
| عملکرد ناپایدار | نویز یا نوسان منبع تغذیه | افزودن خازن فیلتر، منبع پایدارتر |
| فیوز میسوزد | اتصال کوتاه یا بار اضافه | بررسی مدار، کاهش بار |
برنامه نگهداری:
void maintenanceRoutine() { Serial.println("=== برنامه نگهداری ماژول PWM ==="); // 1. تمیزکاری cleanTerminals(); // 2. بررسی اتصالات checkConnections(); // 3. تست عملکرد performanceTest(); // 4. کالیبراسیون سنسورها calibrateSensors(); // 5. ثبت گزارش generateMaintenanceReport(); Serial.println("نگهداری تکمیل شد"); }
📦 مشخصات بستهبندی
محتویات استاندارد:
-
1 عدد ماژول سوئیچ PWM 15A
-
1 عدد هیتسینک آلومینیومی
-
2 عدد خازن فیلتر اضافی
-
4 عدد پیچ نصب M3
-
6 عدد ترمینال پیچی
-
راهنمای نصب سریع
-
دیاگرام اتصالات
لوازم جانبی پیشنهادی:
-
سنسور جریان: ACS712 20A
-
خنککننده: فن 12V 40mm
-
فیوز: 15A سریععملکرد
-
منبع تغذیه: 12V 20A
🏆 مزایای رقابتی
در مقایسه با رلهها:
-
سرعت بالا: کیلوهرتز در مقابل هرتز
-
طول عمر: میلیاردها چرخه در مقابل میلیونها
-
بیصدا: بدون قطع و وصل مکانیکی
-
کنترل دقیق: PWM با دقت بالا
در مقایسه با ترانزیستورهای معمولی:
-
جریان بالاتر: 15A در مقابل 5-10A
-
راندمان بهتر: Rds(on) پایینتر
-
کنترل آسان: Logic-Level بدون درایور اضافی
-
حفاظت داخلی: دیود هرزگرد یکپارچه
🌟 نتیجهگیری
ماژول سوئیچ 15A PWM با MOSFET Logic-Level یک راهحل ایدهآل برای کنترل بارهای سنگین در پروژههای صنعتی، رباتیک، سیستمهای روشنایی و گرمایشی است. با ترکیب قدرت بالا، کنترل دقیق و ایمنی مطلوب، این ماژول ابزاری ضروری برای هر مهندس و سازنده جدی است.
قدرت تحت کنترل، عملکرد با اطمینان
کلمات کلیدی برای جستجو:
ماژول PWM 15A، سوئیچ MOSFET Logic-Level، کنترلر موتور DC پرقدرت، ماژول درایور 15 آمپر، PWM Controller Module، MOSFET Switch Module، Logic Level MOSFET Driver، High Current PWM Controller، DC Motor Speed Controller، 15A Mosfet Module، کنترل سرعت موتور با PWM، درایور موتور 15 آمپر، ماژول سوئیچینگ پرقدرت، کنترل بارهای سنگین

