



 ترانزیستورها
ترانزیستورها خازنها
خازنها دیودها
دیودها رگولاتورها
رگولاتورها مقاومتها
مقاومتها کریستال و اسیلاتور
کریستال و اسیلاتور مدارات مجتمع
مدارات مجتمع ابزارها
ابزارها تجهیزات
تجهیزات تجهیزات لحیمکاری
تجهیزات لحیمکاری مولتیمتر و ابزار اندازهگیری
مولتیمتر و ابزار اندازهگیری منبع تغذیه و باتری
منبع تغذیه و باتری تستر
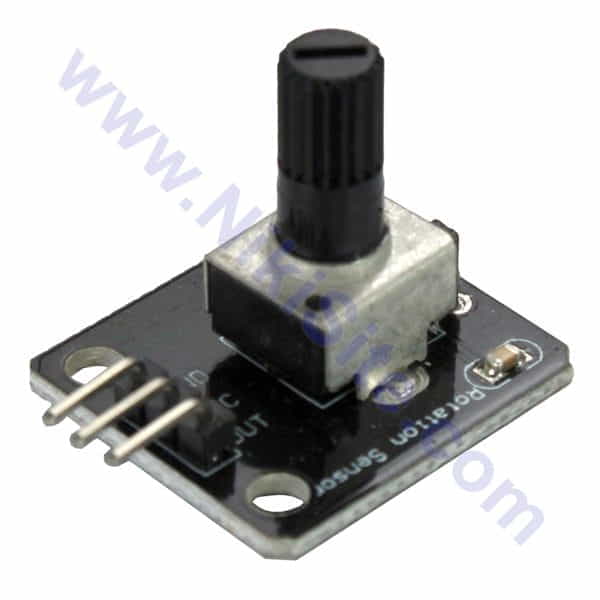
تسترماژول پتانسیومتر آنالوگ
(Potentiometer Module)
رابط آنالوگ هوشمند برای تنظیم پارامترها در سیستمهای دیجیتال
ماژول پتانسیومتر یک رابط کاربری ساده و مؤثر برای تنظیم مقادیر آنالوگ در سیستمهای دیجیتال ارائه میدهد. این ماژول با ترکیب یک پتانسیومتر مکانیکی دقیق و مدارهای تبدیل سیگنال، امکان کنترل پارامترهای مختلف مانند سرعت، روشنایی، ولتاژ و فرکانس را در پروژههای الکترونیکی فراهم میکند. محصولی ایدهآل برای سیستمهای کنترل، تنظیمکنندهها و دستگاههای اندازهگیری.
ویژگیهای کلیدی
-
پتانسیومتر با کیفیت: پتانسیومتر کربنی با عمر طولانی و نویز پایین
-
خروجی دوگانه: هم خروجی آنالوگ (0-VCC) و هم خروجی دیجیتال (PWM)
-
مقاومت قابل تنظیم: معمولاً 10KΩ خطی (B10K)
-
نصب صنعتی: طراحی شده برای نصب روی پنل با مهره قفلی
-
دستهگرد با نشانگر: دستهگرد راحت با نشانگر موقعیت
-
مقیاسگذاری: صفحه درجهبندیشده اختیاری برای نمایش دقیق موقعیت
-
سازگاری کامل: کار با ولتاژ 3.3V و 5V سیستمهای دیجیتال
مشخصات فنی
-
مقاومت اسمی: 10KΩ (موجود در 1KΩ، 5KΩ، 50KΩ، 100KΩ)
-
ولتاژ کاری: 3.3V – 5V DC
-
طول عمر: 10,000 چرخه حداقل
-
تلرانس: ±20% (استاندارد)، ±10% (درجه یک)
-
توان مجاز: 0.1W (در 70°C)
-
دمای کاری: -30°C تا +70°C
-
نوع: خطی (Linear) – تغییر مقاومت متناسب با چرخش
-
زاویه چرخش: 300 درجه مؤثر
-
اندازه دستهگرد: 15mm قطر
-
نوع نصب: پنلمونت با مهره M8
-
ابعاد پنل: سوراخ 8mm برای نصب
کاربردهای اصلی
-
تنظیم روشنایی LED و سیستمهای نورپردازی
-
کنترل سرعت موتورهای DC و سروو موتورها
-
تنظیم فرکانس در مولدهای سیگنال
-
کنترل ولتاژ در منابع تغذیه تنظیمپذیر
-
تنظیم Gain در تقویتکنندههای صوتی
-
رابط کاربری برای منوهای دستگاههای الکترونیکی
-
تنظیم پارامترهای PID در سیستمهای کنترل
-
کالیبراسیون سنسورها و ابزار دقیق
انواع پتانسیومتر بر اساس مشخصه مقاومت
| نوع | مشخصه | کاربرد اصلی |
|---|---|---|
| خطی (Linear) | مقاومت متناسب با زاویه | کنترل ولتاژ، تنظیم سرعت |
| لگاریتمی (Audio/Log) | تغییر لگاریتمی | کنترل صدا، تنظیم Gain صوتی |
| ضد لگاریتمی (Reverse Log) | تغییر معکوس لگاریتمی | کنترلهای خاص صنعتی |
| چند حالته (Multi-turn) | چند دور کامل | تنظیمهای دقیق و حساس |
اتصال به آردوینو
پیکربندی ساده 3 سیمه:
پتانسیومتر → آردوینو ------------------- پایه 1 (چپ) → GND پایه 2 (وسط) → A0 (ورودی آنالوگ) پایه 3 (راست) → 5V
پیکربندی با ماژول:
ماژول پتانسیومتر → آردوینو ------------------------- VCC → 5V یا 3.3V GND → GND SIG → A0 (آنالوگ) PWM → D3 (دیجیتال PWM - اختیاری)
کد پایه آردوینو (خواندن مقدار آنالوگ)
/* * خواندن مقدار پتانسیومتر و نمایش در سریال مانیتور * اتصال: پایه وسط پتانسیومتر به A0 */ const int potPin = A0; // پایه اتصال پتانسیومتر int potValue = 0; // مقدار خام خوانده شده (0-1023) float voltage = 0.0; // ولتاژ محاسبهشده int percentage = 0; // درصد چرخش // برای نمایش گرافیکی const int graphWidth = 40; // عرض نمودار در سریال مانیتور void setup() { Serial.begin(9600); Serial.println("=================================="); Serial.println(" Potentiometer Basic Read"); Serial.println("=================================="); Serial.println("Position | Value | Voltage | %"); Serial.println("---------|-------|---------|---"); } void loop() { // خواندن مقدار آنالوگ potValue = analogRead(potPin); // محاسبه ولتاژ (با فرض VCC = 5V) voltage = potValue * (5.0 / 1023.0); // محاسبه درصد percentage = map(potValue, 0, 1023, 0, 100); // نمایش مقادیر Serial.print(" "); Serial.print(percentage); Serial.print("% | "); Serial.print(potValue); Serial.print(" | "); Serial.print(voltage, 2); Serial.print("V | "); // نمایش گرافیکی int barLength = map(potValue, 0, 1023, 0, graphWidth); for (int i = 0; i < graphWidth; i++) { if (i < barLength) { Serial.print("█"); } else { Serial.print(" "); } } Serial.println("|"); delay(100); // تأخیر 100ms بین خواندنها }
کد کنترل سروو موتور با پتانسیومتر
/* * کنترل موقعیت سروو موتور با پتانسیومتر * اتصال: پتانسیومتر به A0، سروو به D9 */ #include <Servo.h> const int potPin = A0; // پایه پتانسیومتر const int servoPin = 9; // پایه سروو موتور Servo myServo; // ایجاد شیء سروو int potValue; // مقدار پتانسیومتر int servoAngle; // زاویه سروو (0-180 درجه) int lastServoAngle = -1; // زاویه قبلی برای جلوگیری از ارسال تکراری void setup() { Serial.begin(9600); myServo.attach(servoPin); // اتصال سروو به پایه Serial.println("=================================="); Serial.println(" Servo Motor Control with Pot"); Serial.println("=================================="); Serial.println("Pot Value | Servo Angle"); Serial.println("----------|------------"); } void loop() { // خواندن پتانسیومتر potValue = analogRead(potPin); // تبدیل به زاویه سروو (0-180 درجه) servoAngle = map(potValue, 0, 1023, 0, 180); // فقط اگر زاویه تغییر کرده باشد، سروو را حرکت ده if (abs(servoAngle - lastServoAngle) > 1) { // آستانه 1 درجه myServo.write(servoAngle); lastServoAngle = servoAngle; // نمایش اطلاعات Serial.print(" "); Serial.print(potValue); Serial.print(" | "); Serial.print(servoAngle); Serial.println("°"); } delay(15); // تأخیر مناسب برای سروو }
کد کنترل LED RGB با 3 پتانسیومتر
/* * کنترل رنگ LED RGB با سه پتانسیومتر * هر پتانسیومتر کنترل یک رنگ: قرمز، سبز، آبی */ const int potRed = A0; // پتانسیومتر رنگ قرمز const int potGreen = A1; // پتانسیومتر رنگ سبز const int potBlue = A2; // پتانسیومتر رنگ آبی const int ledRed = 9; // پایه PWM برای LED قرمز const int ledGreen = 10; // پایه PWM برای LED سبز const int ledBlue = 11; // پایه PWM برای LED آبی int redValue, greenValue, blueValue; // مقادیر PWM (0-255) int redPot, greenPot, bluePot; // مقادیر پتانسیومترها (0-1023) void setup() { Serial.begin(9600); // تنظیم پایههای LED به عنوان خروجی PWM pinMode(ledRed, OUTPUT); pinMode(ledGreen, OUTPUT); pinMode(ledBlue, OUTPUT); Serial.println("========================================="); Serial.println(" RGB Color Mixer with 3 Potentiometers"); Serial.println("========================================="); Serial.println("R G B | Color Preview"); Serial.println("--- --- --- | -----------------"); } void loop() { // خواندن مقادیر پتانسیومترها redPot = analogRead(potRed); greenPot = analogRead(potGreen); bluePot = analogRead(potBlue); // تبدیل به مقادیر PWM redValue = map(redPot, 0, 1023, 0, 255); greenValue = map(greenPot, 0, 1023, 0, 255); blueValue = map(bluePot, 0, 1023, 0, 255); // اعمال رنگ به LED RGB analogWrite(ledRed, redValue); analogWrite(ledGreen, greenValue); analogWrite(ledBlue, blueValue); // نمایش مقادیر و پیشنمایش رنگ displayColorInfo(); delay(100); } void displayColorInfo() { // نمایش مقادیر RGB Serial.print(redValue); if (redValue < 100) Serial.print(" "); if (redValue < 10) Serial.print(" "); Serial.print(" "); Serial.print(greenValue); if (greenValue < 100) Serial.print(" "); if (greenValue < 10) Serial.print(" "); Serial.print(" "); Serial.print(blueValue); if (blueValue < 100) Serial.print(" "); if (blueValue < 10) Serial.print(" "); Serial.print(" | "); // پیشنمایش متنی رنگ if (redValue > 200 && greenValue < 50 && blueValue < 50) { Serial.print("RED "); } else if (redValue < 50 && greenValue > 200 && blueValue < 50) { Serial.print("GREEN "); } else if (redValue < 50 && greenValue < 50 && blueValue > 200) { Serial.print("BLUE "); } else if (redValue > 200 && greenValue > 200 && blueValue < 50) { Serial.print("YELLOW "); } else if (redValue > 200 && greenValue < 50 && blueValue > 200) { Serial.print("MAGENTA "); } else if (redValue < 50 && greenValue > 200 && blueValue > 200) { Serial.print("CYAN "); } else if (redValue > 200 && greenValue > 200 && blueValue > 200) { Serial.print("WHITE "); } else if (redValue < 50 && greenValue < 50 && blueValue < 50) { Serial.print("BLACK "); } else { Serial.print("CUSTOM "); } // نمایش کد هگز رنگ Serial.print(" #"); printHex(redValue); printHex(greenValue); printHex(blueValue); Serial.println(); } void printHex(int value) { if (value < 16) Serial.print("0"); Serial.print(value, HEX); }
کد پیشرفته: سیستم تنظیم پارامترهای PID
/* * سیستم تنظیم پارامترهای PID با 3 پتانسیومتر * هر پتانسیومتر کنترل یکی از پارامترهای Kp, Ki, Kd */ #include <PID_v1.h> // پایههای پتانسیومترها const int potKp = A0; // پتانسیومتر تنظیم Kp const int potKi = A1; // پتانسیومتر تنظیم Ki const int potKd = A2; // پتانسیومتر تنظیم Kd const int potSetpoint = A3; // پتانسیومتر تنظیم Setpoint // پایههای نمایشگر LCD (اختیاری) const int displayUpdateButton = 2; // دکمه بهروزرسانی نمایش // متغیرهای PID double Setpoint, Input, Output; double Kp, Ki, Kd; PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT); // محدوده تنظیم پارامترها const double Kp_min = 0.0, Kp_max = 10.0; const double Ki_min = 0.0, Ki_max = 5.0; const double Kd_min = 0.0, Kd_max = 2.0; const double Setpoint_min = 0.0, Setpoint_max = 100.0; // متغیرهای نمایش unsigned long lastDisplayUpdate = 0; const unsigned long displayInterval = 500; // هر 500ms بهروزرسانی شود void setup() { Serial.begin(115200); pinMode(displayUpdateButton, INPUT_PULLUP); // مقداردهی اولیه PID Setpoint = 50.0; Input = 0.0; Kp = 2.0; Ki = 0.5; Kd = 0.1; myPID.SetMode(AUTOMATIC); myPID.SetOutputLimits(0, 255); Serial.println("========================================"); Serial.println(" PID Parameter Tuning with Pots"); Serial.println("========================================"); Serial.println("Kp\tKi\tKd\tSetpoint"); Serial.println("---\t---\t---\t--------"); } void loop() { // خواندن مقادیر پتانسیومترها readPotentiometers(); // بهروزرسانی پارامترهای PID updatePIDParameters(); // شبیهسازی فرآیند (در پروژه واقعی اینجا سنسور خوانده میشود) simulateProcess(); // محاسبه PID myPID.Compute(); // اعمال خروجی به فرآیند (در پروژه واقعی به actuator میرود) applyOutput(); // نمایش دورهای پارامترها updateDisplay(); delay(20); } void readPotentiometers() { static int lastPotKp = -1, lastPotKi = -1, lastPotKd = -1, lastPotSp = -1; static unsigned long lastReadTime = 0; // کاهش نرخ خواندن برای کاهش نویز if (millis() - lastReadTime > 50) { int potKpValue = analogRead(potKp); int potKiValue = analogRead(potKi); int potKdValue = analogRead(potKd); int potSpValue = analogRead(potSetpoint); // میانگینگیری برای کاهش نویز potKpValue = (potKpValue + lastPotKp) / 2; potKiValue = (potKiValue + lastPotKi) / 2; potKdValue = (potKdValue + lastPotKd) / 2; potSpValue = (potSpValue + lastPotSp) / 2; // ذخیره برای دفعه بعد lastPotKp = potKpValue; lastPotKi = potKiValue; lastPotKd = potKdValue; lastPotSp = potSpValue; // تبدیل به مقادیر واقعی Kp = mapFloat(potKpValue, 0, 1023, Kp_min, Kp_max); Ki = mapFloat(potKiValue, 0, 1023, Ki_min, Ki_max); Kd = mapFloat(potKdValue, 0, 1023, Kd_min, Kd_max); Setpoint = mapFloat(potSpValue, 0, 1023, Setpoint_min, Setpoint_max); lastReadTime = millis(); } } float mapFloat(long x, long in_min, long in_max, float out_min, float out_max) { return (x - in_min) * (out_max - out_min) / (float)(in_max - in_min) + out_min; } void updatePIDParameters() { myPID.SetTunings(Kp, Ki, Kd); } void simulateProcess() { // شبیهسازی یک فرآیند درجه اول // در پروژه واقعی باید از سنسور خوانده شود static float processValue = 0; const float timeConstant = 2.0; // ثابت زمانی فرآیند const float sampleTime = 0.02; // زمان نمونهبرداری 20ms processValue += (Output - processValue) * sampleTime / timeConstant; Input = processValue; } void applyOutput() { // در پروژه واقعی: فعالسازی actuator // مثلاً: analogWrite(heaterPin, Output); // برای نمایش: static int lastOutput = -1; if (abs(Output - lastOutput) > 1) { lastOutput = Output; // میتوانید اینجا خروجی را به پین PWM اعمال کنید } } void updateDisplay() { // بهروزرسانی نمایش در سریال مانیتور if (millis() - lastDisplayUpdate > displayInterval) { Serial.print(Kp, 2); Serial.print("\t"); Serial.print(Ki, 2); Serial.print("\t"); Serial.print(Kd, 2); Serial.print("\t"); Serial.print(Setpoint, 1); Serial.print("\t| Output: "); Serial.print(Output, 0); Serial.print(" | PV: "); Serial.print(Input, 1); Serial.println(); lastDisplayUpdate = millis(); } // اگر دکمه فشرده شد، نمایش کامل if (digitalRead(displayUpdateButton) == LOW) { displayFullInfo(); delay(300); // Debouncing } } void displayFullInfo() { Serial.println(); Serial.println("=== CURRENT PID PARAMETERS ==="); Serial.print("Kp (Proportional): "); Serial.println(Kp, 3); Serial.print("Ki (Integral): "); Serial.println(Ki, 3); Serial.print("Kd (Derivative): "); Serial.println(Kd, 3); Serial.print("Setpoint: "); Serial.println(Setpoint, 1); Serial.print("Process Value: "); Serial.println(Input, 1); Serial.print("Control Output: "); Serial.println(Output, 0); Serial.println("==============================="); Serial.println(); }
کد عملی: ولتمتر دیجیتال با کالیبراسیون پتانسیومتر
/* * ولتمتر دیجیتال با قابلیت کالیبراسیون با پتانسیومتر * پتانسیومتر برای تنظیم offset و gain استفاده میشود */ const int voltagePin = A0; // ورودی ولتاژ مورد اندازهگیری const int calibOffsetPin = A1; // پتانسیومتر کالیبراسیون offset const int calibGainPin = A2; // پتانسیومتر کالیبراسیون gain const int modeButton = 2; // دکمه تغییر حالت // متغیرهای کالیبراسیون float calibOffset = 0.0; // تصحیح offset float calibGain = 1.0; // تصحیح gain // حالتهای عملکرد enum Mode { MEASURE, CALIB_OFFSET, CALIB_GAIN }; Mode currentMode = MEASURE; // ولتاژ مرجع داخلی آردوینو (میتواند 1.1V یا 5V باشد) const float vRef = 5.0; const int adcResolution = 1023; // برای نمایش 7-Segment (اختیاری) const int digitPins[] = {3, 4, 5, 6}; // پایههای انتخاب رقم const int segmentPins[] = {7, 8, 9, 10, 11, 12, 13}; // پایههای segments void setup() { Serial.begin(9600); pinMode(modeButton, INPUT_PULLUP); Serial.println("=================================="); Serial.println(" Digital Voltmeter with Calibration"); Serial.println("=================================="); Serial.println("Modes: M=Measure, O=Offset Calib, G=Gain Calib"); Serial.println("Press button to change mode"); Serial.println(); } void loop() { // بررسی دکمه تغییر حالت checkModeButton(); // اجرای عملکرد بر اساس حالت فعلی switch (currentMode) { case MEASURE: measureVoltage(); break; case CALIB_OFFSET: calibrateOffset(); break; case CALIB_GAIN: calibrateGain(); break; } delay(100); } void checkModeButton() { static unsigned long lastPress = 0; if (digitalRead(modeButton) == LOW && millis() - lastPress > 300) { // تغییر حالت چرخشی currentMode = static_cast<Mode>((currentMode + 1) % 3); lastPress = millis(); Serial.print("Mode changed to: "); switch (currentMode) { case MEASURE: Serial.println("MEASUREMENT"); break; case CALIB_OFFSET: Serial.println("OFFSET CALIBRATION"); break; case CALIB_GAIN: Serial.println("GAIN CALIBRATION"); break; } } } void measureVoltage() { // خواندن ولتاژ ورودی int rawValue = analogRead(voltagePin); // اعمال کالیبراسیون float voltage = (rawValue * (vRef / adcResolution) + calibOffset) * calibGain; // نمایش نتیجه static unsigned long lastDisplay = 0; if (millis() - lastDisplay > 500) { Serial.print("Voltage: "); Serial.print(voltage, 3); Serial.print("V | Raw: "); Serial.print(rawValue); Serial.print(" | Offset: "); Serial.print(calibOffset, 3); Serial.print(" | Gain: "); Serial.print(calibGain, 3); Serial.println(); // همچنین میتوانید روی LCD نمایش دهید // displayOnLCD(voltage); lastDisplay = millis(); } } void calibrateOffset() { // خواندن پتانسیومتر offset int potValue = analogRead(calibOffsetPin); // تبدیل به محدوده offset (مثلاً -1V تا +1V) calibOffset = map(potValue, 0, 1023, -1000, 1000) / 1000.0; // نمایش وضعیت کالیبراسیون static unsigned long lastDisplay = 0; if (millis() - lastDisplay > 300) { Serial.print("Offset Calibration: "); Serial.print(calibOffset, 3); Serial.print("V | Pot: "); Serial.print(potValue); // نمایش گرافیکی Serial.print(" | ["); int barPos = map(potValue, 0, 1023, 0, 20); for (int i = 0; i < 20; i++) { if (i == 10) Serial.print("|"); else if (i == barPos) Serial.print("█"); else Serial.print(" "); } Serial.println("]"); lastDisplay = millis(); } } void calibrateGain() { // خواندن پتانسیومتر gain int potValue = analogRead(calibGainPin); // تبدیل به محدوده gain (مثلاً 0.8 تا 1.2) calibGain = map(potValue, 0, 1023, 800, 1200) / 1000.0; // نمایش وضعیت کالیبراسیون static unsigned long lastDisplay = 0; if (millis() - lastDisplay > 300) { Serial.print("Gain Calibration: "); Serial.print(calibGain, 3); Serial.print(" | Pot: "); Serial.print(potValue); // نمایش گرافیکی Serial.print(" | ["); int barPos = map(potValue, 0, 1023, 0, 20); for (int i = 0; i < 20; i++) { if (i == 10) Serial.print("|"); else if (i == barPos) Serial.print("█"); else Serial.print(" "); } Serial.println("]"); lastDisplay = millis(); } }
نکات فنی و عیبیابی
انتخاب پتانسیومتر مناسب:
| کاربرد | مقاومت توصیه شده | نوع | توضیح |
|---|---|---|---|
| کنترل ولتاژ | 1KΩ – 10KΩ | خطی | جریان کمی از منبع میکشد |
| کنترل صدا | 10KΩ – 100KΩ | لگاریتمی | پاسخگویی مناسب گوش انسان |
| کنترل سرعت موتور | 5KΩ – 50KΩ | خطی | نویز پایین، پاسخ سریع |
| تنظیمهای دقیق | 1KΩ – 10KΩ | چنددور | دقت بالا در تنظیم |
عیبیابی مشکلات رایج:
| مشکل | علت احتمالی | راهحل |
|---|---|---|
| نویز در خواندن مقادیر | مقاومت بالا + سیمهای بلند | استفاده از مقاومت 10KΩ یا کمتر |
| پرش مقادیر | پتانسیومتر فرسوده | تعویض پتانسیومتر |
| تغییر غیرخطی | پتانسیومتر لگاریتمی به جای خطی | انتخاب نوع صحیح |
| گرم شدن پتانسیومتر | جریان زیاد از آن میگذرد | استفاده از مقاومت بالاتر یا مدار بافر |
افزایش دقت و کاهش نویز:
// تابع پیشرفته خواندن پتانسیومتر با فیلتر int readPotentiometer(int pin, int samples = 10) { long total = 0; // حذف اولین نمونه (ممکن است ناپایدار باشد) analogRead(pin); delay(1); // میانگینگیری چند نمونه for (int i = 0; i < samples; i++) { total += analogRead(pin); delay(2); } // حذف مقادیر پرت int average = total / samples; // فیلتر میانگین متحرک static int filterBuffer[5] = {0}; static int filterIndex = 0; filterBuffer[filterIndex] = average; filterIndex = (filterIndex + 1) % 5; long filteredTotal = 0; for (int i = 0; i < 5; i++) { filteredTotal += filterBuffer[i]; } return filteredTotal / 5; }
ذخیره تنظیمات در EEPROM:
#include <EEPROM.h> void saveCalibration(float offset, float gain) { EEPROM.put(0, offset); EEPROM.put(4, gain); Serial.println("Calibration saved to EEPROM"); } void loadCalibration() { EEPROM.get(0, calibOffset); EEPROM.get(4, calibGain); Serial.println("Calibration loaded from EEPROM"); }
پروژههای پیشنهادی
1. سیستم میکسر صوتی دیجیتال
// کنترل 4 کانال صدا با پتانسیومترهای لگاریتمی
2. کنترلر دمای دوگانه
// تنظیم دمای day و night با دو پتانسیومتر
3. مولد سیگنال با فرکانس قابل تنظیم
// تولید sine, square, triangle با فرکانس متغیر
4. منبع تغذیه آزمایشگاهی
// تنظیم ولتاژ 0-30V و جریان 0-5A
5. تایمر چند کاناله صنعتی
// تنظیم زمانهای مختلف برای رلهها
جدول مقایسه انواع پتانسیومتر
| نوع | دقت | قیمت | عمر مفید | کاربرد |
|---|---|---|---|---|
| کربنی | متوسط | ارزان | 10,000 چرخه | عمومی، آموزشی |
| سیمی (Wirewound) | بالا | متوسط | 100,000 چرخه | صنعتی، توان بالا |
| پلاستیکی رسانا | متوسط | ارزان | 50,000 چرخه | صوتی، مصرفی |
| فیلم فلزی | بسیار بالا | گران | 1,000,000 چرخه | ابزار دقیق، پزشکی |
| غیرتماسی (Hall) | بالا | بسیار گران | نامحدود | محیطهای خشن |
پکیج خرید
پکیج پایه:
-
1x پتانسیومتر 10KΩ خطی با دستهگرد
-
1x مهره و واشر نصب
-
1x صفحه درجهبندی شفاف
-
راهنمای نصب فارسی
پکیج حرفهای:
-
3x پتانسیومتر 10KΩ خطی
-
1x پتانسیومتر 100KΩ لگاریتمی (برای صدا)
-
1x پتانسیومتر چنددور 10KΩ
-
1x جعبه نصب 4 واحده
-
1x کابلهای رابط آماده
-
1x DVD شامل پروژههای نمونه
پکیج آموزشی:
-
5x پتانسیومتر انواع مختلف
-
برد آزمایشی برای تست
-
10x کابل jumper
-
کتابچه پروژههای عملی
-
دسترسی به دوره ویدیویی
گارانتی و پشتیبانی
- آموزش: ویدیوهای آموزشی رایگان
-
مشاوره: پشتیبانی تلفنی برای طراحی مدار
-
جامعه: دسترسی به گروه کاربران ایرانی
سؤالات متداول
Q1: تفاوت پتانسیومتر خطی و لگاریتمی چیست؟
پتانسیومتر خطی تغییر مقاومت یکنواخت دارد، اما لگاریتمی برای کنترل صدا طراحی شده که پاسخگویی آن مشابه گوش انسان است.
Q2: چگونه پتانسیومتر چنددور را تشخیص دهم؟
پتانسیومترهای چنددور معمولاً دستهگرد بلندتری دارند و روی آنها نوشته شده “Multi-turn” یا حرف “W” بعد از مقدار مقاومت.
Q3: آیا میتوانم پتانسیومتر را به عنوان سنسور موقعیت استفاده کنم؟
بله، با کالیبراسیون مناسب میتواند سنسور موقعیت زاویهای با دقت 1-2 درجه باشد.
Q4: حداکثر سرعت چرخش مجاز چقدر است؟
معمولاً 100 RPM برای انواع استاندارد. برای سرعتهای بالاتر از انکودرهای نوری استفاده کنید.
Q5: چگونه نویز پتانسیومتر را کاهش دهم؟
-
استفاده از مقاومت 10KΩ یا کمتر
-
خازن 0.1µF بین پایه وسط و زمین
-
فیلتر نرمافزاری با میانگینگیری
-
منبع تغذیه با ریپل پایین
توجه: برای پروژههای حساس به نویز، حتماً از فیلترهای نرمافزاری و سختافزاری استفاده کنید. پتانسیومترهای با کیفیت پایین ممکن است نویز زیادی تولید کنند. برای دریافت مشاوره فنی و انتخاب پتانسیومتر مناسب برای کاربرد شما، با پشتیبانی فنی ما تماس بگیرید.