








")
")
")
")
")
")






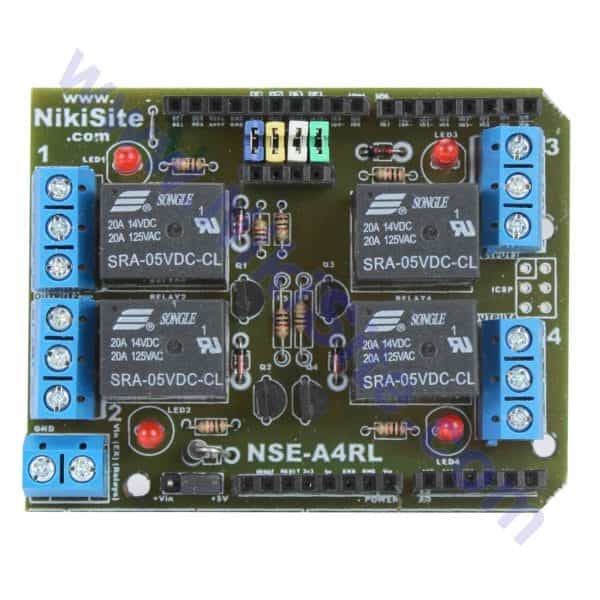
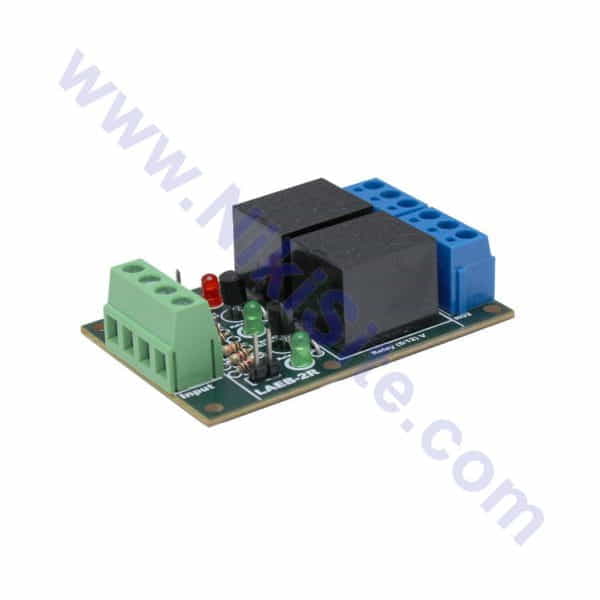
ماژول رله ۵ ولت
65,000 تومانهر عدد
ماژول رله ۵ ولت تک کنتاکت یک راهحل مطمئن، ایمن و مقرونبهصرفه برای کنترل بارهای قدرت با سیگنالهای دیجیتال کمولتاژ است.
با طراحی حرفهای، قطعات با کیفیت و تستهای جامع، این ماژول قابلیت اطمینان بالایی برای کاربردهای صنعتی و خانگی ارائه میدهد.
| تعداد | قیمت | تخفیف |
|---|---|---|
| 10-49 | 63,700 تومان هر عدد | 2% |
| 50+ | 63,050 تومان هر عدد | 3% |
موجود در انبار
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
(Single Channel 5V Relay Module)
ماژول رله ۵ ولت تک کنتاکت
معرفی ماژول رله ۵ ولت تک کاناله
ماژول رله ۵ ولت تک کنتاکت یک سوئیچ الکترومکانیکی قابل کنترل دیجیتال است که امکان کنترل مدارهای ولتاژ بالا با سیگنالهای کمولتاژ را فراهم میکند. این ماژول برای جداسازی کامل بین بخش کنترل و بار قدرت طراحی شده است.
انواع رله تک کنتاکت موجود
۱. رله PCB Relay (ماژول استاندارد)
سایز: ۱۵×۲۰mm
جریان: ۱۰A تا ۳۰A
ولتاژ: ۲۵۰V AC / ۳۰V DC
پیکربندی: SPDT (یک کنتاکت)
۲. رله Power Relay (قدرت بالا)
سایز: ۲۵×۲۵mm
جریان: ۳۰A تا ۵۰A
ولتاژ: ۴۴۰V AC / ۱۰۰V DC
قابلیت: اتصال مستقیم به برد
۳. رله Solid State Relay (حالت جامد)
سایز: ۲۰×۱۵mm
جریان: ۲A تا ۲۵A
سرعت: سوئیچینگ سریع
طول عمر: بالاتر
مشخصات فنی کامل
مشخصات رله الکترومکانیکی:
نوع کنتاکت: SPDT (Single Pole Double Throw)
تعداد پایه: ۵ پایه (CO, NC, NO, A1, A2)
جریان نامی: ۱۰A @ ۲۵۰V AC / ۱۰A @ ۳۰V DC
ولتاژ عایقی: ۱۵۰۰V AC بین کوئل و کنتاکت
مقاومت عایقی: ۱۰۰MΩ @ ۵۰۰V DC
قدرت کوئل: ۴۰۰mW
طول عمر مکانیکی: ۱۰،۰۰۰،۰۰۰ عملیات
طول عمر الکتریکی: ۱۰۰،۰۰۰ عملیات در بار نامی
زمان عملکرد: ۱۰ms روشن / ۵ms خاموش
دمای کاری: -۴۰°C تا +۷۰°C
مشخصات مدار درایور:
ولتاژ کنترل: ۵V DC (سازگار با ۳٫۳V منطق)
جریان مصرف کوئل: ۷۲mA @ ۵V
مدار درایور: ترانزیستور NPN (S8050) + دیود flyback
محافظت: دیود آزادگرد (D1) برای حفاظت از back EMF
جداسازی نوری: اپتوکوپلر در مدلهای ایزوله
LED نشانگر: LED قرمز برای وضعیت رله
مشخصات اتصالات قدرت:
ترمینال ورودی: ترمینال پیچی ۳ پین
سایز سیم مجاز: تا ۱٫۵mm²
گشتاور پیچ: ۰٫۵Nm
فاصله خزشی: ۸mm بین ترمینالها
دیاگرام شماتیک و عملکرد
پینهای مهم:
GND: زمین مدار
IN: سیگنال کنترل (LOW = روشن، HIGH = خاموش)
VCC: تغذیه ۵ ولت برای کوئل رله
- COM: پایه مشترک
NO: کنتاکت Normally Open (در حالت عادی باز)
NC: کنتاکت Normally Closed (در حالت عادی بسته)
نحوه اتصالات قدرت:
public: void designPowerTraces() { // محاسبه عرض مسیر برای 10A float current = 10.0; // آمپر float thickness = 0.07; // mm (2 اونس) float temperatureRise = 20.0; // درجه سانتیگراد // فرمول IPC-2221 float traceWidth = (current / (k * pow(temperatureRise, 0.44))) * pow(thickness, 0.725); // تقریباً 3mm برای 10A } void designTerminalPads() { // طراحی Pad برای ترمینال float holeDiameter = 3.2; // mm float padDiameter = 6.0; // mm int holeCount = 4; // تعداد سوراخ برای استحکام } };
محاسبات و انتخاب قطعات
محاسبه جریان کوئل:
public: struct RelaySpecs { float coilVoltage; // ولتاژ کوئل float coilResistance; // مقاومت کوئل float coilPower; // توان کوئل }; float calculateCoilCurrent(RelaySpecs specs) { // I = V / R return specs.coilVoltage / specs.coilResistance; } float calculateRequiredTransistorGain(float coilCurrent, float microcontrollerCurrent) { // β_min = I_coil / I_micro return coilCurrent / microcontrollerCurrent; } bool checkTransistorCompatibility(float coilCurrent, float transistorIcMax) { return coilCurrent < transistorIcMax; } }; // مثال: RelaySpecs specs = {5.0, 70.0, 0.4}; // 5V, 70Ω, 0.4W CoilCalculator calc; float coilCurrent = calc.calculateCoilCurrent(specs); // 71.4mA
محاسبه دیود Flyback:
public: struct CoilCharacteristics { float inductance; // اندوکتانس کوئل float current; // جریان کوئل float resistance; // مقاومت کوئل }; float calculateBackEMF(CoilCharacteristics coil, float turnOffTime) { // V = L * di/dt return coil.inductance * (coil.current / turnOffTime); } string selectDiode(float backEMF, float coilCurrent) { if(backEMF < 100 && coilCurrent < 100) { return "1N4148"; // سیگنال } else if(backEMF < 400 && coilCurrent < 1000) { return "1N4007"; // همهکاره } else { return "UF4007"; // سریع } } float calculatePowerDissipation(float forwardVoltage, float current, float dutyCycle) { return forwardVoltage * current * dutyCycle; } };
کاربردهای صنعتی و عملی
۱. کنترل روشنایی و بارهای AC:
private: int relayPin; bool state; public: void setup(int pin) { relayPin = pin; pinMode(relayPin, OUTPUT); turnOff(); // حالت ایمن } void turnOn() { digitalWrite(relayPin, LOW); // فعالسازی state = true; logEvent("Light ON"); } void turnOff() { digitalWrite(relayPin, HIGH); // غیرفعال state = false; logEvent("Light OFF"); } void toggle() { if(state) turnOff(); else turnOn(); } void timedOperation(int duration) { turnOn(); delay(duration * 1000); turnOff(); } };
۲. کنترل موتورها و بارهای القایی:
private: struct MotorSpecs { float voltage; float current; float power; string type; // AC/DC }; MotorSpecs motor; int relayPin; public: void controlMotor(bool direction, int speedPercent) { // کنترل موتور DC if(motor.type == "DC") { controlDCMotor(direction, speedPercent); } else { controlACMotor(speedPercent); } } void softStart(int rampTime) { // راهاندازی نرم موتور for(int i = 0; i <= 100; i += 10) { controlMotor(true, i); delay(rampTime * 10); } } void emergencyStop() { digitalWrite(relayPin, HIGH); logEmergency("Motor STOPPED"); } };
۳. سیستمهای ایمنی و اضطراری:
private: int emergencyRelayPin; bool emergencyState; public: void setup(int pin) { emergencyRelayPin = pin; pinMode(emergencyRelayPin, OUTPUT); enableSafetyMode(); // حالت ایمن } void enableSafetyMode() { // قطع همه بارها digitalWrite(emergencyRelayPin, HIGH); emergencyState = true; } void disableSafetyMode() { digitalWrite(emergencyRelayPin, LOW); emergencyState = false; } void checkSafetySensors() { // مانیتورینگ سنسورهای ایمنی if(readSmokeSensor() > THRESHOLD) { enableSafetyMode(); triggerAlarm(); } if(readTemperature() > MAX_TEMP) { enableSafetyMode(); activateCooling(); } } };
سیستمهای کنترل پیشرفته
۱. کنترل PWM برای بارهای AC:
private: int relayPin; int pwmFrequency; int pwmDutyCycle; public: void setup(int pin, int frequency) { relayPin = pin; pwmFrequency = frequency; pinMode(relayPin, OUTPUT); } void setDutyCycle(int duty) { pwmDutyCycle = constrain(duty, 0, 100); // کنترل رله با PWM int onTime = (1000000 / pwmFrequency) * (pwmDutyCycle / 100.0); int offTime = (1000000 / pwmFrequency) - onTime; // اجرای PWM digitalWrite(relayPin, LOW); delayMicroseconds(onTime); digitalWrite(relayPin, HIGH); delayMicroseconds(offTime); } void softStart(int targetDuty, int rampTime) { for(int i = 0; i <= targetDuty; i++) { setDutyCycle(i); delay(rampTime); } } };
۲. سیستم زمانبندی اتوماتیک:
private: struct Schedule { int hour; int minute; bool action; // true=ON, false=OFF }; Schedule dailySchedule[10]; int scheduleCount; public: void addSchedule(int h, int m, bool act) { if(scheduleCount < 10) { dailySchedule[scheduleCount] = {h, m, act}; scheduleCount++; } } void checkAndExecute() { int currentHour = hour(); int currentMinute = minute(); for(int i = 0; i < scheduleCount; i++) { if(dailySchedule[i].hour == currentHour && dailySchedule[i].minute == currentMinute) { executeAction(dailySchedule[i].action); } } } void executeAction(bool action) { if(action) { digitalWrite(relayPin, LOW); // روشن } else { digitalWrite(relayPin, HIGH); // خاموش } } };
۳. کنترل از راه دور با ارتباط بیسیم:
private: int relayPin; RF24 radio; public: void setup(int pin, uint8_t address) { relayPin = pin; pinMode(relayPin, OUTPUT); // تنظیمات رادیو radio.begin(); radio.openReadingPipe(1, address); radio.startListening(); } void checkCommands() { if(radio.available()) { char command; radio.read(&command, sizeof(command)); switch(command) { case '1': // روشن digitalWrite(relayPin, LOW); sendAck("ON"); break; case '0': // خاموش digitalWrite(relayPin, HIGH); sendAck("OFF"); break; case 'T': // حالت چشمکزن blinkMode(500); break; } } } void sendAck(String status) { radio.stopListening(); radio.write(status.c_str(), status.length()); radio.startListening(); } };
ملاحظات ایمنی و حفاظتی
مدارهای حفاظتی اضافه:
private: const float OVERCURRENT_THRESHOLD = 12.0; // A const float OVERTEMP_THRESHOLD = 85.0; // °C public: void addCurrentProtection() { // استفاده از فیوز قابل بازنشانی addResettableFuse(10); // 10A addCurrentSensor(); } void addVoltageProtection() { // محافظت در برابر ولتاژ بالا addMOV(275); // 275V MOV addTVSdiode(400); // 400V TVS } void addArcSuppression() { // سرکوب جرقه در کنتاکتها addRCsnubber(100, 0.1); // 100Ω, 0.1μF addVaristor(); } void monitorRelayHealth() { // مانیتورینگ سلامت رله float contactResistance = measureContactResistance(); float operateTime = measureOperateTime(); float releaseTime = measureReleaseTime(); if(contactResistance > 0.1) { // اهم logWarning("Relay contact wear detected"); } } };
ایزولاسین گالوانیک:
public: void implementOptoisolation() { // استفاده از اپتوکوپلر برای جداسازی کامل addOptocoupler("PC817", 5000); // 5000V isolation // مدار ایزوله شده: // میکروکنترلر ← اپتوکوپلر ← درایور ← رله } void designIsolatedPowerSupply() { // منبع تغذیه جداگانه برای بخش قدرت addIsolatedDCConverter(5, 5, 1000); // 5V to 5V, 1000V isolation // ترانسفورماتور ایزوله یا کنورتر flyback } float measureIsolationResistance() { // اندازهگیری مقاومت عایقی applyTestVoltage(500); // 500V DC float leakageCurrent = measureLeakage(); return 500 / leakageCurrent; // مقاومت عایقی } };
تست و عیبیابی
برنامه تست جامع:
public: void runComprehensiveTest() { Serial.println("=== Relay Comprehensive Test ==="); // ۱. تست عملکرد پایه testBasicOperation(); // ۲. تست زمانها testTimingCharacteristics(); // ۳. تست جریان testCurrentConsumption(); // ۴. تست حرارتی testThermalPerformance(); // ۵. تست عمر testLifeCycle(); } void testBasicOperation() { Serial.println("Basic Operation Test:"); // تست روشن/خاموش for(int i = 0; i < 10; i++) { digitalWrite(relayPin, LOW); delay(100); bool onState = checkRelayState(); digitalWrite(relayPin, HIGH); delay(100); bool offState = checkRelayState(); Serial.print("Cycle "); Serial.print(i); Serial.print(": ON="); Serial.print(onState); Serial.print(", OFF="); Serial.println(offState); } } void testTimingCharacteristics() { Serial.println("Timing Test:"); // اندازهگیری زمان عملکرد unsigned long startTime = micros(); digitalWrite(relayPin, LOW); while(!checkRelayState()) { } unsigned long operateTime = micros() - startTime; startTime = micros(); digitalWrite(relayPin, HIGH); while(checkRelayState()) { } unsigned long releaseTime = micros() - startTime; Serial.print("Operate Time: "); Serial.print(operateTime); Serial.println(" μs"); Serial.print("Release Time: "); Serial.print(releaseTime); Serial.println(" μs"); } void testCurrentConsumption() { Serial.println("Current Consumption Test:"); // اندازهگیری جریان کوئل float voltage = 5.0; float shuntResistance = 1.0; // اهم digitalWrite(relayPin, LOW); delay(50); // زمان تثبیت float voltageDrop = analogRead(A0) * (5.0 / 1023.0); float coilCurrent = voltageDrop / shuntResistance; Serial.print("Coil Current: "); Serial.print(coilCurrent); Serial.println(" A"); Serial.print("Coil Power: "); Serial.print(coilCurrent * voltage); Serial.println(" W"); } };
عیبیابی معمول:
۱. بررسی تغذیه ۵V (LED روشن است؟) ۲. بررسی اتصال GND ۳. بررسی سیگنال IN (مقاومت pull-up/down) ۴. تست ترانزیستور درایور ۵. تست دیود flyback مشکل: رله به صورت تصادفی قطع/وصل میشود ۱. بررسی نویز روی خط IN ۲. اضافه کردن خازن 0.1μF موازی با IN و GND ۳. بررسی پایداری منبع تغذیه ۴. استفاده از Schmitt trigger برای سیگنال مشکل: جرقه در کنتاکتها ۱. اضافه کردن مدار snubber ۲. استفاده از MOV برای بارهای القایی ۳. کاهش جریان بار ۴. استفاده از رله با جریان بالاتر مشکل: گرمای بیش از حد ۱. بررسی جریان بار (از ۱۰A بیشتر نشود) ۲. بهبود تهویه و خنککاری ۳. استفاده از هیتسینگ برای ترمینالها ۴. کاهش فرکانس سوئیچینگ
بستهبندی و محتویات
بسته استاندارد شامل:
۱ عدد ماژول رله تک کاناله کامل
۱ عدد کانکتور هدر ۴ پین نری
۲ عدد پیچ M3 برای نصب
۱ عدد دیود ۱N4007 اضافی
۱ عدد ترانزیستور S8050 اضافی
بسته حرفهای شامل:
۱ عدد ماژول با اپتوکوپلر
۲ عدد ماژول عادی
۱ عدد برد تست با بار لامپ
۱ عدد منبع تغذیه ۵V 2A
کابلهای اتصال مختلف
بسته توسعهدهنده شامل:
۵ عدد ماژول رله
PCB خام برای تمرین
قطعات یدکی کامل
کتابچه راهنمای فارسی
مثالهای برنامهنویسی
پشتیبانی فنی:
راهنمای نصب فارسی کامل
- مثالهای برنامهنویسی
پشتیبانی تلفنی و آنلاین
مشاوره طراحی سیستم
جمعبندی
ماژول رله ۵ ولت تک کنتاکت یک راهحل مطمئن، ایمن و مقرونبهصرفه برای کنترل بارهای قدرت با سیگنالهای دیجیتال کمولتاژ است. با طراحی حرفهای، قطعات با کیفیت و تستهای جامع، این ماژول قابلیت اطمینان بالایی برای کاربردهای صنعتی و خانگی ارائه میدهد.
چه برای اتوماسیون خانگی، کنترل صنعتی یا پروژههای آموزشی، این ماژول انتخابی ایدهآل است.
| ابعاد | 2 × 2 × 2 سانتیمتر |
|---|---|
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) | |
| لایه های مدارچاپی | |
| نوع مدار | |
| کشور سازنده |
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.



















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.