








")
")
")
")
")
")






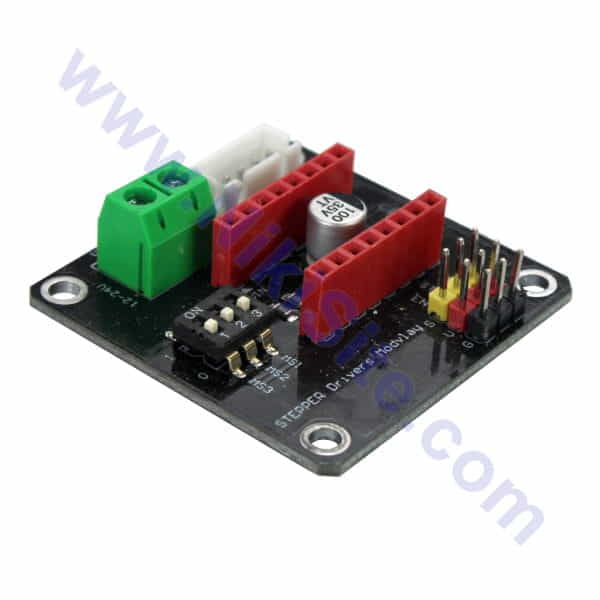
شیلد موتور پلهای برای درایورهای A4988 یا DRV8825
قیمت اصلی: 235,000 تومان بود.229,000 تومانقیمت فعلی: 229,000 تومان.هر عدد
شیلد درایور موتور پلهای یک برد توسعه کامل برای کنترل حرفهای موتورهای پلهای با استفاده از درایورهای A4988 یا DRV8825 است.
این شیلد امکان کنترل تا ۲ موتور پلهای را به صورت همزمان فراهم کرده و با قابلیتهایی مانند تنظیم جریان، میکرواستپینگ، حفاظت حرارتی و قطع ارتباط خودکار، انتخاب ایدهآلی برای پروژههای CNC، پرینترهای ۳ بعدی، رباتیک و اتوماسیون صنعتی میباشد.
| تعداد | قیمت | تخفیف |
|---|---|---|
| 10-49 | 224,420 تومان هر عدد | 2% |
| 50+ | 222,130 تومان هر عدد | 3% |
موجود در انبار
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
شیلد درایور موتور پلهای
(A4988/DRV8825)
راهحل جامع کنترل موتورهای پلهای با دقت و قدرت بالا
شیلد درایور موتور پلهای یک برد توسعه کامل برای کنترل حرفهای موتورهای پلهای با استفاده از درایورهای A4988 یا DRV8825 است. این شیلد امکان کنترل تا ۲ موتور پلهای را به صورت همزمان فراهم کرده و با قابلیتهایی مانند تنظیم جریان، میکرواستپینگ، حفاظت حرارتی و قطع ارتباط خودکار، انتخاب ایدهآلی برای پروژههای CNC، پرینترهای ۳ بعدی، رباتیک و اتوماسیون صنعتی میباشد.
ویژگیهای کلیدی
پشتیبانی از دو درایور: قابلیت استفاده همزمان از A4988 و DRV8825
تنظیم جریان دقیق: پتانسیومتر برای تنظیم جریان هر موتور به صورت مجزا
میکرواستپینگ پیشرفته: پشتیبانی تا ۱/۳۲ میکرواستپ (DRV8825) و ۱/۱۶ (A4988)
حفاظت کامل: محافظ در برابر اتصال کوتاه، اضافه جریان و اضافه دما
خنککننده یکپارچه: هیتسینک آلومینیومی برای هر درایور
منبع تغذیه دوگانه: ورودی منطقی ۵V و ورودی موتور تا ۳۵V
اتصالات صنعتی: ترمینال پیچی برای اتصال آسان موتورها
کاهش نویز: خازنهای سرامیکی و الکترولیتی برای فیلتر نویز
سازگاری کامل: پینهای سازگار با آردوینو Uno، Mega، Nano
مشخصات فنی
مشخصات کلی:
ولتاژ ورودی منطق: 3.3V – 5V (از آردوینو)
ولتاژ موتور: 8V – 35V (A4988) / 8.2V – 45V (DRV8825)
جریان پیوسته: تا 2A در هر فاز (با خنککاری)
جریان پالسی: تا 2.5A (A4988) / تا 2.5A (DRV8825)
میکرواستپینگ: 1, 1/2, 1/4, 1/8, 1/16 (A4988) + 1/32 (DRV8825)
ابعاد برد: 70mm × 54mm (مطابق آردوینو Uno)
حفاظت حرارتی: Shutdown در 150°C (A4988) / 165°C (DRV8825)
پینهای مهم:
موتور 1: ENABLE1 (D8) - فعال/غیرفعال کردن درایور STEP1 (D5) - پالس قدم DIR1 (D6) - جهت چرخش MS1, MS2, MS3 - انتخاب میکرواستپ موتور 2: ENABLE2 (D9) STEP2 (D7) DIR2 (D4) MS1, MS2, MS3 منبع تغذیه: VMOT - ولتاژ موتور (8-35V) GND - زمین موتور VDD - ولتاژ منطق (3.3-5V)
مقایسه درایورها:
| ویژگی | A4988 | DRV8825 |
|---|---|---|
| ولتاژ کاری | 8-35V | 8.2-45V |
| جریان پیوسته | 1-2A | 1.5-2.5A |
| میکرواستپینگ | تا 1/16 | تا 1/32 |
| مقاومت سنس جریان | 0.05Ω | 0.1Ω |
| راندمان | متوسط | بالا |
| قیمت | ارزانتر | گرانتر |
اتصال موتور پلهای NEMA 17
موتور پلهای ← شیلد ------------------- فاز 1A → 1A فاز 1B → 1B فاز 2A → 2A فاز 2B → 2B گرمایش ← GND (اختیاری)
نکته: ترتیب فازها بسیار مهم است. اگر موتور درست کار نکرد، سیمهای یک فاز را جابجا کنید.
کد پایه: کنترل موتور پلهای
/* * کنترل ساده موتور پلهای با شیلد A4988/DRV8825 * حرکت در دو جهت با سرعتهای مختلف */ // پایههای موتور 1 const int ENABLE1 = 8; const int STEP1 = 5; const int DIR1 = 6; // پایههای موتور 2 const int ENABLE2 = 9; const int STEP2 = 7; const int DIR2 = 4; // پایههای میکرواستپ (مشترک برای هر دو موتور) const int MS1 = 10; const int MS2 = 11; const int MS3 = 12; // تنظیمات موتور const int STEPS_PER_REV = 200; // برای موتور NEMA 17 int microstep = 16; // مقدار میکرواستپ (1, 2, 4, 8, 16, 32) int totalStepsPerRev; // مراحل کامل در هر دور // سرعت موتور (تأخیر بین استپها در میکروثانیه) int stepDelay = 1000; // 1000 میکروثانیه = 1ms void setup() { Serial.begin(9600); // تنظیم پایهها به عنوان خروجی pinMode(ENABLE1, OUTPUT); pinMode(STEP1, OUTPUT); pinMode(DIR1, OUTPUT); pinMode(ENABLE2, OUTPUT); pinMode(STEP2, OUTPUT); pinMode(DIR2, OUTPUT); pinMode(MS1, OUTPUT); pinMode(MS2, OUTPUT); pinMode(MS3, OUTPUT); // غیرفعال کردن موتورها در ابتدا (LOW = فعال) digitalWrite(ENABLE1, HIGH); digitalWrite(ENABLE2, HIGH); // تنظیم میکرواستپ setupMicrostepping(microstep); // محاسبه مراحل کامل totalStepsPerRev = STEPS_PER_REV * microstep; Serial.println("\n\n========================================"); Serial.println(" Stepper Motor Shield Controller"); Serial.println("========================================"); Serial.print("Motor: NEMA 17 ("); Serial.print(STEPS_PER_REV); Serial.println(" steps/rev)"); Serial.print("Microstepping: 1/"); Serial.println(microstep); Serial.print("Total steps/rev: "); Serial.println(totalStepsPerRev); Serial.println("Commands: F=Forward, B=Backward, S=Stop"); Serial.println(" +=Faster, -=Slower, ?=Help"); Serial.println("----------------------------------------"); } void loop() { if (Serial.available()) { char command = Serial.read(); processCommand(command); } // میتوانید حرکات خودکار را اینجا اضافه کنید // autoDemo(); delay(10); } void processCommand(char cmd) { switch (cmd) { case 'F': case 'f': Serial.println("Moving FORWARD"); moveMotor(1, true, totalStepsPerRev); // 1 دور به جلو break; case 'B': case 'b': Serial.println("Moving BACKWARD"); moveMotor(1, false, totalStepsPerRev); // 1 دور به عقب break; case 'S': case 's': Serial.println("STOPPING"); stopMotors(); break; case '+': increaseSpeed(); break; case '-': decreaseSpeed(); break; case '1': moveMotor(1, true, totalStepsPerRev / 4); // 90 درجه break; case '2': moveMotor(2, true, totalStepsPerRev / 2); // 180 درجه break; case '3': moveBothMotors(true, totalStepsPerRev); // هر دو موتور break; case '?': showHelp(); break; case 'M': // تغییر میکرواستپ changeMicrostepping(); break; } } void moveMotor(int motor, bool forward, int steps) { // فعال کردن موتور if (motor == 1) { digitalWrite(ENABLE1, LOW); digitalWrite(DIR1, forward ? HIGH : LOW); } else { digitalWrite(ENABLE2, LOW); digitalWrite(DIR2, forward ? HIGH : LOW); } delay(10); // تأخیر برای فعال شدن // ارسال پالسهای استپ for (int i = 0; i < steps; i++) { if (motor == 1) { digitalWrite(STEP1, HIGH); delayMicroseconds(stepDelay); digitalWrite(STEP1, LOW); } else { digitalWrite(STEP2, HIGH); delayMicroseconds(stepDelay); digitalWrite(STEP2, LOW); } delayMicroseconds(stepDelay); } // غیرفعال کردن موتور پس از حرکت if (motor == 1) { digitalWrite(ENABLE1, HIGH); } else { digitalWrite(ENABLE2, HIGH); } Serial.print("Motor "); Serial.print(motor); Serial.print(" moved "); Serial.print(steps); Serial.print(" steps ("); Serial.print((steps * 360.0) / totalStepsPerRev, 1); Serial.println(" degrees)"); } void moveBothMotors(bool forward, int steps) { // فعال کردن هر دو موتور digitalWrite(ENABLE1, LOW); digitalWrite(ENABLE2, LOW); digitalWrite(DIR1, forward ? HIGH : LOW); digitalWrite(DIR2, forward ? HIGH : LOW); delay(10); // حرکت همزمان for (int i = 0; i < steps; i++) { digitalWrite(STEP1, HIGH); digitalWrite(STEP2, HIGH); delayMicroseconds(stepDelay); digitalWrite(STEP1, LOW); digitalWrite(STEP2, LOW); delayMicroseconds(stepDelay); } // غیرفعال کردن digitalWrite(ENABLE1, HIGH); digitalWrite(ENABLE2, HIGH); Serial.print("Both motors moved "); Serial.print(steps); Serial.println(" steps"); } void stopMotors() { digitalWrite(ENABLE1, HIGH); digitalWrite(ENABLE2, HIGH); Serial.println("Motors disabled"); } void setupMicrostepping(int mode) { // جدول تنظیمات میکرواستپ: // MS1 MS2 MS3 | Microstep Resolution // L L L | Full Step // H L L | Half Step // L H L | 1/4 Step // H H L | 1/8 Step // H H H | 1/16 Step (A4988) / 1/32 Step (DRV8825) switch (mode) { case 1: // Full Step digitalWrite(MS1, LOW); digitalWrite(MS2, LOW); digitalWrite(MS3, LOW); break; case 2: // Half Step digitalWrite(MS1, HIGH); digitalWrite(MS2, LOW); digitalWrite(MS3, LOW); break; case 4: // 1/4 Step digitalWrite(MS1, LOW); digitalWrite(MS2, HIGH); digitalWrite(MS3, LOW); break; case 8: // 1/8 Step digitalWrite(MS1, HIGH); digitalWrite(MS2, HIGH); digitalWrite(MS3, LOW); break; case 16: // 1/16 Step (A4988) digitalWrite(MS1, HIGH); digitalWrite(MS2, HIGH); digitalWrite(MS3, HIGH); break; case 32: // 1/32 Step (DRV8825) // برای DRV8825 تنظیمات متفاوت است digitalWrite(MS1, HIGH); digitalWrite(MS2, HIGH); digitalWrite(MS3, HIGH); break; } // بهروزرسانی مراحل کامل totalStepsPerRev = STEPS_PER_REV * mode; } void changeMicrostepping() { // چرخش بین حالتهای مختلف میکرواستپ int modes[] = {1, 2, 4, 8, 16, 32}; static int modeIndex = 2; // شروع از 1/4 استپ modeIndex = (modeIndex + 1) % 6; microstep = modes[modeIndex]; setupMicrostepping(microstep); Serial.print("Microstepping changed to: 1/"); Serial.println(microstep); Serial.print("Total steps/rev: "); Serial.println(totalStepsPerRev); } void increaseSpeed() { if (stepDelay > 100) { stepDelay -= 100; Serial.print("Speed increased. Delay: "); Serial.print(stepDelay); Serial.println("µs"); } else { Serial.println("Maximum speed reached"); } } void decreaseSpeed() { if (stepDelay < 5000) { stepDelay += 100; Serial.print("Speed decreased. Delay: "); Serial.print(stepDelay); Serial.println("µs"); } else { Serial.println("Minimum speed reached"); } } void showHelp() { Serial.println("\n=== Stepper Motor Control Help ==="); Serial.println("F / f - Move motor 1 forward 1 revolution"); Serial.println("B / b - Move motor 1 backward 1 revolution"); Serial.println("S / s - Stop/disables motors"); Serial.println("+ - Increase speed"); Serial.println("- - Decrease speed"); Serial.println("1 - Move motor 1 90 degrees"); Serial.println("2 - Move motor 2 180 degrees"); Serial.println("3 - Move both motors together"); Serial.println("M - Change microstepping mode"); Serial.println("? - Show this help"); Serial.println("\nCurrent Settings:"); Serial.print(" Step delay: "); Serial.print(stepDelay); Serial.println(" µs"); Serial.print(" Microstepping: 1/"); Serial.println(microstep); Serial.print(" Steps per revolution: "); Serial.println(totalStepsPerRev); Serial.println("==============================\n"); } void autoDemo() { // نمایش خودکار قابلیتها static unsigned long lastDemo = 0; static int demoState = 0; if (millis() - lastDemo > 3000) { switch (demoState) { case 0: Serial.println("Demo: Moving forward 180 degrees"); moveMotor(1, true, totalStepsPerRev / 2); break; case 1: Serial.println("Demo: Moving backward 180 degrees"); moveMotor(1, false, totalStepsPerRev / 2); break; case 2: Serial.println("Demo: Changing microstepping to 1/8"); microstep = 8; setupMicrostepping(microstep); break; case 3: Serial.println("Demo: Moving both motors"); moveBothMotors(true, totalStepsPerRev / 4); break; } demoState = (demoState + 1) % 4; lastDemo = millis(); } }
کد پیشرفته: کنترل موقعیت با شتاب
/* * کنترل موقعیت موتور پلهای با شتاب/کاهش شتاب * مناسب برای CNC و پرینترهای 3 بعدی */ #include <AccelStepper.h> // تعریف موتورها با کتابخانه AccelStepper // استفاده از حالت Driver (پین STEP و DIR) AccelStepper stepper1(AccelStepper::DRIVER, 5, 6); // STEP, DIR AccelStepper stepper2(AccelStepper::DRIVER, 7, 4); // STEP, DIR // پایههای کنترل const int ENABLE_PIN = 8; const int LIMIT_SWITCH_X = 9; // سوئیچ محدودیت محور X const int LIMIT_SWITCH_Y = 10; // سوئیچ محدودیت محور Y const int EMERGENCY_STOP = 11; // توقف اضطراری // تنظیمات موتور const float STEPS_PER_MM = 80.0; // مراحل بر میلیمتر (بسته به موتور و پولی) const int MAX_SPEED = 1000; // حداکثر سرعت (steps/sec) const int MAX_ACCEL = 500; // حداکثر شتاب (steps/sec^2) const float TRAVEL_X = 200.0; // محدوده حرکت X (mm) const float TRAVEL_Y = 200.0; // محدوده حرکت Y (mm) // متغیرهای سیستم bool motorsEnabled = false; bool homingComplete = false; float currentX = 0; float currentY = 0; float targetX = 0; float targetY = 0; enum MachineState { STATE_IDLE, STATE_HOMING, STATE_MOVING, STATE_EMERGENCY }; MachineState currentState = STATE_IDLE; void setup() { Serial.begin(115200); // تنظیم پایهها pinMode(ENABLE_PIN, OUTPUT); pinMode(LIMIT_SWITCH_X, INPUT_PULLUP); pinMode(LIMIT_SWITCH_Y, INPUT_PULLUP); pinMode(EMERGENCY_STOP, INPUT_PULLUP); // غیرفعال کردن موتورها در ابتدا disableMotors(); // تنظیمات موتورها setupSteppers(); Serial.println("\n\n========================================"); Serial.println(" CNC Stepper Control System"); Serial.println("========================================"); Serial.print("Steps per mm: "); Serial.println(STEPS_PER_MM); Serial.print("Travel X: "); Serial.print(TRAVEL_X); Serial.println(" mm"); Serial.print("Travel Y: "); Serial.print(TRAVEL_Y); Serial.println(" mm"); Serial.println("\nCommands:"); Serial.println(" HOME - Home both axes"); Serial.println(" ENABLE - Enable motors"); Serial.println(" DISABLE - Disable motors"); Serial.println(" G0 X Y - Rapid move to position"); Serial.println(" G1 X Y F - Linear move with feedrate"); Serial.println(" POS - Show current position"); Serial.println(" STATUS - Show system status"); Serial.println(" ? - Show help"); Serial.println("----------------------------------------"); } void loop() { // خواندن دستورات سریال checkSerialCommands(); // بررسی توقف اضطراری checkEmergencyStop(); // بررسی سوئیچهای محدودیت checkLimitSwitches(); // اجرای منطق بر اساس حالت switch (currentState) { case STATE_IDLE: idleState(); break; case STATE_HOMING: homingState(); break; case STATE_MOVING: movingState(); break; case STATE_EMERGENCY: emergencyState(); break; } // اجرای موتورها stepper1.run(); stepper2.run(); delay(1); } void setupSteppers() { // تنظیمات موتور 1 (محور X) stepper1.setMaxSpeed(MAX_SPEED); stepper1.setAcceleration(MAX_ACCEL); stepper1.setEnablePin(ENABLE_PIN); stepper1.setPinsInverted(false, false, true); // DIR, STEP, ENABLE // تنظیمات موتور 2 (محور Y) stepper2.setMaxSpeed(MAX_SPEED); stepper2.setAcceleration(MAX_ACCEL); stepper2.setPinsInverted(false, false, true); } void enableMotors() { if (!motorsEnabled) { digitalWrite(ENABLE_PIN, LOW); motorsEnabled = true; Serial.println("Motors ENABLED"); } } void disableMotors() { if (motorsEnabled) { digitalWrite(ENABLE_PIN, HIGH); motorsEnabled = false; Serial.println("Motors DISABLED"); } } void checkSerialCommands() { if (Serial.available()) { String command = Serial.readStringUntil('\n'); command.trim(); command.toUpperCase(); processGCode(command); } } void processGCode(String gcode) { if (gcode == "HOME") { startHoming(); } else if (gcode == "ENABLE") { enableMotors(); } else if (gcode == "DISABLE") { disableMotors(); } else if (gcode == "POS") { showPosition(); } else if (gcode == "STATUS") { showStatus(); } else if (gcode == "?") { showHelp(); } else if (gcode.startsWith("G0")) { // حرکت سریع: G0 X100 Y50 parseMoveCommand(gcode, true); } else if (gcode.startsWith("G1")) { // حرکت خطی: G1 X100 Y50 F500 parseMoveCommand(gcode, false); } else if (gcode.startsWith("G28")) { // رفتن به home startHoming(); } else if (gcode.startsWith("M84")) { // غیرفعال کردن موتورها disableMotors(); } else if (gcode.startsWith("M17")) { // فعال کردن موتورها enableMotors(); } else { Serial.print("Unknown command: "); Serial.println(gcode); } } void parseMoveCommand(String gcode, bool rapidMove) { // تجزیه دستور حرکت float x = currentX; float y = currentY; float f = MAX_SPEED / STEPS_PER_MM; // سرعت پیشفرض mm/sec // پیدا کردن مقادیر X و Y و F int xIndex = gcode.indexOf('X'); int yIndex = gcode.indexOf('Y'); int fIndex = gcode.indexOf('F'); if (xIndex != -1) { String xStr = gcode.substring(xIndex + 1); // حذف هر چیزی بعد از عدد xStr = splitValue(xStr); x = xStr.toFloat(); } if (yIndex != -1) { String yStr = gcode.substring(yIndex + 1); yStr = splitValue(yStr); y = yStr.toFloat(); } if (fIndex != -1) { String fStr = gcode.substring(fIndex + 1); fStr = splitValue(fStr); f = fStr.toFloat(); } // بررسی محدوده if (x < 0 || x > TRAVEL_X || y < 0 || y > TRAVEL_Y) { Serial.println("ERROR: Target position out of range"); return; } // حرکت به موقعیت هدف moveToPosition(x, y, f, rapidMove); } String splitValue(String str) { // جدا کردن مقدار عددی از رشته for (int i = 0; i < str.length(); i++) { if (!isdigit(str.charAt(i)) && str.charAt(i) != '.' && str.charAt(i) != '-') { return str.substring(0, i); } } return str; } void startHoming() { if (currentState == STATE_IDLE) { Serial.println("Starting homing sequence..."); currentState = STATE_HOMING; homingComplete = false; enableMotors(); // تنظیم سرعت کم برای homing stepper1.setMaxSpeed(200); stepper2.setMaxSpeed(200); stepper1.setAcceleration(200); stepper2.setAcceleration(200); // حرکت به سمت سوئیچهای محدودیت stepper1.moveTo(-10000); // حرکت به سمت منفی stepper2.moveTo(-10000); } } void homingState() { // بررسی برخورد با سوئیچها bool xHomed = (digitalRead(LIMIT_SWITCH_X) == LOW); bool yHomed = (digitalRead(LIMIT_SWITCH_Y) == LOW); // توقف موتور وقتی سوئیچ فشرده شد if (xHomed && stepper1.isRunning()) { stepper1.stop(); stepper1.setCurrentPosition(0); Serial.println("X axis homed"); } if (yHomed && stepper2.isRunning()) { stepper2.stop(); stepper2.setCurrentPosition(0); Serial.println("Y axis homed"); } // اگر هر دو محور هوم شدند if (xHomed && yHomed && !homingComplete) { // حرکت کمی به عقب برای آزاد کردن سوئیچها stepper1.moveTo(10); stepper2.moveTo(10); // انتظار برای حرکت delay(500); // تنظیم موقعیت صفر stepper1.setCurrentPosition(0); stepper2.setCurrentPosition(0); currentX = 0; currentY = 0; // بازگرداندن سرعتها به حالت عادی stepper1.setMaxSpeed(MAX_SPEED); stepper2.setMaxSpeed(MAX_SPEED); stepper1.setAcceleration(MAX_ACCEL); stepper2.setAcceleration(MAX_ACCEL); homingComplete = true; currentState = STATE_IDLE; Serial.println("Homing complete!"); Serial.println("All axes at zero position"); } } void moveToPosition(float x, float y, float feedrate, bool rapid) { if (!homingComplete) { Serial.println("ERROR: Please home axes first"); return; } // تبدیل میلیمتر به استپ long xSteps = x * STEPS_PER_MM; long ySteps = y * STEPS_PER_MM; // تنظیم سرعت float speed = feedrate * STEPS_PER_MM; // تبدیل به steps/sec if (rapid) { speed = MAX_SPEED; // حداکثر سرعت برای حرکت سریع } stepper1.setMaxSpeed(speed); stepper2.setMaxSpeed(speed); // حرکت به موقعیت stepper1.moveTo(xSteps); stepper2.moveTo(ySteps); targetX = x; targetY = y; currentState = STATE_MOVING; Serial.print("Moving to: X"); Serial.print(x, 1); Serial.print(" Y"); Serial.print(y, 1); Serial.print(" at "); Serial.print(feedrate); Serial.println(" mm/sec"); } void movingState() { // بررسی رسیدن به موقعیت if (!stepper1.isRunning() && !stepper2.isRunning()) { // بهروزرسانی موقعیت فعلی currentX = stepper1.currentPosition() / STEPS_PER_MM; currentY = stepper2.currentPosition() / STEPS_PER_MM; currentState = STATE_IDLE; Serial.print("Move complete. Current position: X"); Serial.print(currentX, 1); Serial.print(" Y"); Serial.println(currentY, 1); } } void idleState() { // حالت آمادهباش // میتوانید عملیات پسزمینه را اینجا انجام دهید } void checkEmergencyStop() { if (digitalRead(EMERGENCY_STOP) == LOW) { emergencyStop(); } } void emergencyStop() { stepper1.stop(); stepper2.stop(); disableMotors(); currentState = STATE_EMERGENCY; Serial.println("!!! EMERGENCY STOP !!!"); Serial.println("System halted. Reset required."); } void emergencyState() { // حالت توقف اضطراری // فقط منتظر ریست شدن سیستم digitalWrite(ENABLE_PIN, HIGH); // چشمک زدن LED یا بوق هشدار static unsigned long lastBlink = 0; static bool blinkState = false; if (millis() - lastBlink > 500) { blinkState = !blinkState; // digitalWrite(LED_BUILTIN, blinkState); lastBlink = millis(); } } void checkLimitSwitches() { // اگر در حال حرکت هستیم و سوئیچ فشرده شد، توقف اضطراری if (currentState == STATE_MOVING || currentState == STATE_HOMING) { if (digitalRead(LIMIT_SWITCH_X) == LOW && !homingComplete) { Serial.println("X limit switch triggered!"); stepper1.stop(); } if (digitalRead(LIMIT_SWITCH_Y) == LOW && !homingComplete) { Serial.println("Y limit switch triggered!"); stepper2.stop(); } } } void showPosition() { Serial.print("Current position: X"); Serial.print(currentX, 2); Serial.print("mm Y"); Serial.print(currentY, 2); Serial.println("mm"); Serial.print("Motor steps: X"); Serial.print(stepper1.currentPosition()); Serial.print(" Y"); Serial.println(stepper2.currentPosition()); } void showStatus() { Serial.println("\n=== SYSTEM STATUS ==="); Serial.print("State: "); switch (currentState) { case STATE_IDLE: Serial.println("IDLE"); break; case STATE_HOMING: Serial.println("HOMING"); break; case STATE_MOVING: Serial.println("MOVING"); break; case STATE_EMERGENCY: Serial.println("EMERGENCY STOP"); break; } Serial.print("Motors: "); Serial.println(motorsEnabled ? "ENABLED" : "DISABLED"); Serial.print("Homing: "); Serial.println(homingComplete ? "COMPLETE" : "NOT HOMED"); Serial.print("Position: X"); Serial.print(currentX, 1); Serial.print("mm Y"); Serial.print(currentY, 1); Serial.println("mm"); Serial.print("Limit switches: X="); Serial.print(digitalRead(LIMIT_SWITCH_X) ? "OPEN" : "TRIGGERED"); Serial.print(" Y="); Serial.println(digitalRead(LIMIT_SWITCH_Y) ? "OPEN" : "TRIGGERED"); Serial.print("Emergency stop: "); Serial.println(digitalRead(EMERGENCY_STOP) ? "READY" : "TRIGGERED"); Serial.println("===================\n"); } void showHelp() { Serial.println("\n=== CNC Control System Help ==="); Serial.println("G-Code Commands:"); Serial.println(" G0 X[pos] Y[pos] - Rapid move (maximum speed)"); Serial.println(" G1 X[pos] Y[pos] F[feedrate] - Linear move"); Serial.println(" G28 - Home all axes"); Serial.println(" M84 - Disable steppers"); Serial.println(" M17 - Enable steppers"); Serial.println("\nSystem Commands:"); Serial.println(" HOME - Home both axes"); Serial.println(" ENABLE - Enable motors"); Serial.println(" DISABLE - Disable motors"); Serial.println(" POS - Show current position"); Serial.println(" STATUS - Show system status"); Serial.println(" ? - Show this help"); Serial.println("\nExamples:"); Serial.println(" G0 X100 Y50 - Move to X100 Y50 rapidly"); Serial.println(" G1 X50 Y75 F300 - Move to X50 Y75 at 300mm/sec"); Serial.println("==============================\n"); }
کد تنظیم جریان موتور
/* * تنظیم جریان موتور برای A4988/DRV8825 * مهم: تنظیم نادرست جریان میتواند به موتور آسیب بزند! */ // فرمول محاسبه جریان: // Vref = I_max * 8 * R_sense // A4988: R_sense = 0.05Ω // DRV8825: R_sense = 0.1Ω const int MOTOR_CURRENT_POT = A0; // پتانسیومتر تنظیم جریان const int TEST_BUTTON = 2; // دکمه تست const int MOTOR_ENABLE = 8; const int MOTOR_STEP = 5; const int MOTOR_DIR = 6; // تنظیمات موتور const float RSENSE = 0.1; // اهم (برای DRV8825) const float MAX_CURRENT = 1.5; // آمپر (برچسب موتور را بررسی کنید) float targetCurrent = 0.5; // جریان هدف (آمپر) void setup() { Serial.begin(9600); pinMode(MOTOR_ENABLE, OUTPUT); pinMode(MOTOR_STEP, OUTPUT); pinMode(MOTOR_DIR, OUTPUT); pinMode(TEST_BUTTON, INPUT_PULLUP); digitalWrite(MOTOR_ENABLE, HIGH); // غیرفعال در ابتدا Serial.println("\n\n========================================"); Serial.println(" Stepper Motor Current Calibration"); Serial.println("========================================"); Serial.println("WARNING: Adjust current slowly!"); Serial.println("Too high current can damage motor/driver."); Serial.println(); Serial.print("R_sense: "); Serial.print(RSENSE); Serial.println(" Ω"); Serial.print("Max motor current: "); Serial.print(MAX_CURRENT); Serial.println(" A"); Serial.println(); Serial.println("Turn potentiometer to adjust current."); Serial.println("Press button to test motor."); Serial.println("----------------------------------------"); } void loop() { // خواندن پتانسیومتر int potValue = analogRead(MOTOR_CURRENT_POT); // تبدیل به جریان (0 تا MAX_CURRENT) targetCurrent = (potValue / 1023.0) * MAX_CURRENT; // محاسبه Vref مورد نیاز float vref = targetCurrent * 8.0 * RSENSE; // نمایش وضعیت static unsigned long lastDisplay = 0; if (millis() - lastDisplay > 500) { Serial.print("Current: "); Serial.print(targetCurrent, 2); Serial.print("A | Vref: "); Serial.print(vref, 3); Serial.print("V | Pot: "); Serial.print(potValue); // نمایش پیشنهاد Serial.print(" | Suggestion: "); if (targetCurrent < MAX_CURRENT * 0.3) { Serial.println("TOO LOW - Motor may skip steps"); } else if (targetCurrent < MAX_CURRENT * 0.7) { Serial.println("GOOD - Normal operation"); } else if (targetCurrent < MAX_CURRENT * 0.9) { Serial.println("HIGH - Good for high torque"); } else { Serial.println("MAX - Use with caution!"); } lastDisplay = millis(); } // تست موتور با دکمه if (digitalRead(TEST_BUTTON) == LOW) { testMotor(); delay(300); // Debouncing } // نکته: در این کد Vref به صورت نرمافزاری محاسبه میشود // در عمل باید پتانسیومتر روی درایور را تنظیم کنید delay(10); } void testMotor() { Serial.println("\n--- Motor Test ---"); Serial.print("Testing at "); Serial.print(targetCurrent, 2); Serial.println("A"); // فعال کردن موتور digitalWrite(MOTOR_ENABLE, LOW); // حرکت کوچک به جلو digitalWrite(MOTOR_DIR, HIGH); for (int i = 0; i < 100; i++) { digitalWrite(MOTOR_STEP, HIGH); delayMicroseconds(500); digitalWrite(MOTOR_STEP, LOW); delayMicroseconds(500); } // حرکت کوچک به عقب digitalWrite(MOTOR_DIR, LOW); for (int i = 0; i < 100; i++) { digitalWrite(MOTOR_STEP, HIGH); delayMicroseconds(500); digitalWrite(MOTOR_STEP, LOW); delayMicroseconds(500); } // غیرفعال کردن موتور digitalWrite(MOTOR_ENABLE, HIGH); // بررسی عملکرد Serial.println("Test complete. Check motor behavior:"); Serial.println("- Smooth movement: Good current"); Serial.println("- Jerky/skipping: Current too low"); Serial.println("- Overheating: Current too high"); Serial.println("--- End Test ---\n"); } // تابع برای تنظیم دستی Vref با مولتیمتر void manualCalibrationGuide() { Serial.println("\n=== Manual Calibration Guide ==="); Serial.println("1. Connect multimeter to Vref pin on driver"); Serial.println("2. Adjust potentiometer on driver board"); Serial.println("3. Measure and set Vref according to formula:"); Serial.println(" Vref = I_max × 8 × R_sense"); Serial.println(); Serial.println("Example calculations:"); Serial.println("For 1A current with DRV8825 (R_sense=0.1Ω):"); Serial.println(" Vref = 1.0 × 8 × 0.1 = 0.8V"); Serial.println(); Serial.println("For 1.5A current with A4988 (R_sense=0.05Ω):"); Serial.println(" Vref = 1.5 × 8 × 0.05 = 0.6V"); Serial.println("===============================\n"); }
نکات حیاتی نصب و استفاده
تنظیم جریان صحیح:
محاسبه Vref:
Vref = جریان_موردنیاز × 8 × R_sense مثال برای موتور 1.2A با DRV8825: Vref = 1.2 × 8 × 0.1 = 0.96V
روش تنظیم:
مولتیمتر را روی ولتاژ DC تنظیم کنید
پراب مثبت به پین Vref درایور
پراب منفی به GND درایور
پتانسیومتر را تا رسیدن به ولتاژ محاسبهشده بچرخانید
خنککاری ضروری:
// مانیتور دمای درایور void monitorTemperature() { // A4988: Shutdown at 150°C, Thermal hysteresis 25°C // DRV8825: Shutdown at 165°C // علائم گرمای بیش از حد: // 1. کاهش گشتاور // 2. توقف ناگهانی // 3. بوی سوختگی // راهحلها: // 1. اضافه کردن هیتسینک بزرگتر // 2. استفاده از فن 5V یا 12V // 3. کاهش جریان موتور // 4. افزایش زمان خاموش بودن }
اتصالات صحیح:
| مشکل | علت | راهحل |
|---|---|---|
| موتور حرکت نمیکند | اتصال نادرست فازها | سیمهای یک فاز را جابجا کنید |
| موتور داغ میشود | جریان بیش از حد | کاهش Vref |
| درایور داغ میشود | عدم خنککاری | اضافه کردن هیتسینک و فن |
| حرکت ناصاف | میکرواستپ نادرست | تنظیم صحیح MS1, MS2, MS3 |
| نویز در سیستم | سیمکندی ضعیف | استفاده از کانکتورهای مناسب |
کاهش نویز و EMI:
خازنهای بایپس:
100µF الکترولیتی نزدیک ورودی VMOT
0.1µF سرامیکی بین هر VMOT و GND
سیمکندی:
استفاده از کابل به هم تابیده برای موتور
جدا کردن سیمهای سیگنال از سیمهای قدرت
اتصال زمین صحیح
شیلدینگ:
محفظه فلزی برای درایور
فریتبید روی کابل موتور
پروژههای پیشنهادی
1. پرینتر 3 بعدی DIY
// کنترل 3 محور X, Y, Z با اکستروژر2. دستگاه CNC کوچک
// کنترل محورهای X, Y برای حکاکی3. ربات پلوتار
// کنترل 4 موتور برای حرکت ربات4. اسکنر 3 بعدی
// کنترل موتور برای چرخش قطعه5. تلسکوپ ردیاب ستارهها
// کنترل دقیق موتور برای ردیابی اجرام آسمانیجدول انتخاب موتور مناسب
| کاربرد | نوع موتور | جریان | میکرواستپ | نکات |
|---|---|---|---|---|
| پرینتر 3 بعدی | NEMA 17 | 1.2-1.5A | 1/16 یا 1/32 | دقت بالا، نویز کم |
| CNC کوچک | NEMA 17 | 1.5-1.8A | 1/8 یا 1/16 | گشتاور متوسط |
| رباتیک | NEMA 14 | 0.8-1.2A | 1/8 | سبک، کم مصرف |
| صنعتی سبک | NEMA 23 | 2.0-2.5A | 1/4 | گشتاور بالا |
| میکرو موقعیتیابی | NEMA 8 | 0.5-0.8A | 1/32 | دقت بسیار بالا |
پکیج خرید
پکیج پایه:
1x شیلد درایور موتور پلهای
2x درایور A4988 با هیتسینک
1x موتور پلهای NEMA 17
1x آداپتور 12V/2A
کابل اتصال موتور
پیچ و مهره نصب
پکیج پرینتر 3 بعدی:
1x شیلد درایور
4x درایور DRV8825 با فن خنککننده
4x موتور NEMA 17
1x منبع تغذیه 24V/10A
1x کیت CNC shield
1x مجموعه ابزار تنظیم
پکیج توسعهدهنده:
1x شیلد درایور
2x A4988 + 2x DRV8825
4x موتور مختلف (NEMA 8, 14, 17, 23)
1x کیت تست جریان و دما
1x مولتیمتر دیجیتال
کتابچه 20 پروژه عملی
گارانتی و پشتیبانی
- پشتیبانی فنی: رایگان از طریق واتساپ
آموزش: ویدیوهای تنظیم جریان و میکرواستپ
کتابخانه: دسترسی به آخرین نسخه AccelStepper
جامعه: گروه کاربران موتور پلهای
سؤالات متداول
Q1: تفاوت A4988 و DRV8825 چیست؟
A4988 ارزانتر و برای کاربردهای عمومی. DRV8825 با میکرواستپ 1/32 و ولتاژ بالاتر برای دقت بیشتر.
Q2: چرا موتور من داغ میشود؟
جریان بیش از حد تنظیم شده. Vref را کاهش دهید یا از خنککننده استفاده کنید.
Q3: میکرواستپ چیست و کدام بهتر است؟
تقسیم هر استپ به بخشهای کوچکتر برای حرکت نرمتر. 1/16 تعادل خوبی بین دقت و گشتاور دارد.
Q4: حداکثر سرعت چقدر است؟
حدود 2000-3000 استپ بر ثانیه بسته به موتور و ولتاژ.
Q5: چگونه از سوختن درایور جلوگیری کنم؟
جریان صحیح تنظیم شود
خنککننده مناسب
اتصال کوتاه نشود
ولتاژ ورودی از حد مجاز بیشتر نباشد
هشدار: تنظیم نادرست جریان میتواند به موتور و درایور آسیب جدی بزند. همیشه با کمترین جریان شروع کنید و به تدریج افزایش دهید. برای کاربردهای حساس با مهندسین ما مشورت کنید.
| ابعاد | 2 × 2 × 2 سانتیمتر |
|---|---|
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) | |
| لایه های مدارچاپی | |
| نوع مدار | |
| کشور سازنده |
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.

























دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.