









")



")
")
")
")
")
")
")
")










نقشه ماژول سنسور برخورد 2
50,000 تومانهر فایل
Crash Sensor Module V2
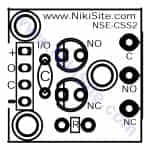
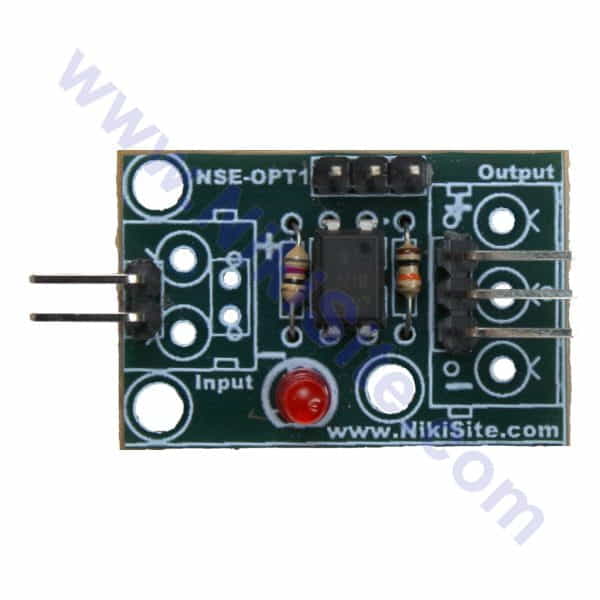
این ماژول سنسور برخورد NSE-CSS2
به دلیل اتصال ساده و آسان بسیار پرکاربرد است که از طریق کابل سه سیمه میتوان این محصول را به بردهای مختلف MCU متصل کرد.
مکانیزم کاری این ماژول به صورت سوئیچ میباشد.
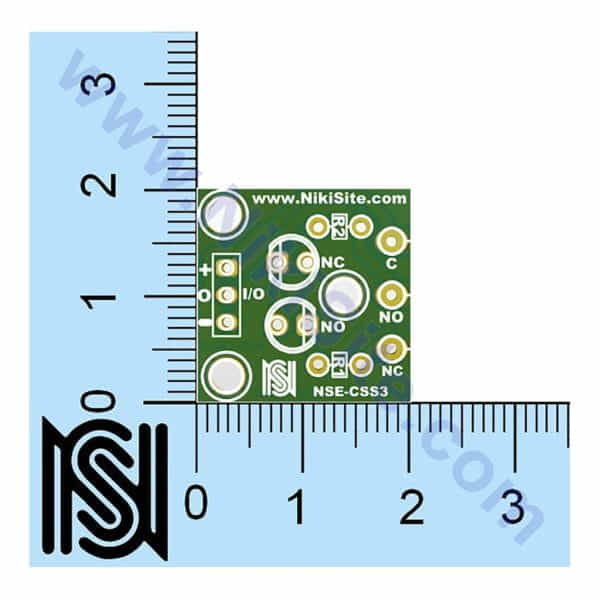
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
ماژول سنسور برخورد 2
Crash Sensor Module V2
رابط کاربردی با خروجی NO/NC و فیلتر نویز
🎯 ماژول سنسور برخورد V2: تشخیص ساده و قابل اعتماد با قابلیتهای حرفهای
ماژول سنسور برخورد V2 یک راهحل بهینهشده و کاربردی برای تشخیص تماس فیزیکی و محدودیتهای حرکتی است. با طراحی مینیمال و کارآمد، این ماژول تمام امکانات ضروری برای یک سنسور برخورد قابل اعتماد را در قالبی جمعوجور ارائه میدهد.
✨ ویژگیهای متمایز V2
🎛️ طراحی ساده و موثر:
نمایشگر LED دو حالته: وضعیت NO و NC به صورت بصری
خازن فیلتر نویز: حذف نوسانات و بایاسهای الکتریکی
خروجی دوگانه: هر دو حالت Normally Open و Normally Closed
🔧 عملکرد قابل اطمینان:
پاسخ آنی: عکسالعمل فوری به تماس فیزیکی
ایزولاسیون نوری: جداسازی مدار نمایشگر از سیگنال
مقاومت در برابر نویز: فیلترینگ فعال برای محیطهای صنعتی
📊 مشخصات فنی دقیق
ویژگیهای الکتریکی:
ولتاژ کاری: 5V DC (محدوده 3.3V-12V)
جریان مصرف: < 15mA (با LED روشن)
ولتاژ خروجی NO: 0V (باز) → Vcc (بسته)
ولتاژ خروجی NC: Vcc (باز) → 0V (بسته)
خازن فیلتر: 100nF سرامیکی X7R
ویژگیهای مکانیکی:
نوع سوئیچ: میکروسوییچ استاندارد SPST
نیروی فعالسازی: 0.7N ± 0.2N
سفر سوئیچ: 0.5mm ± 0.1mm
طول عمر: 500,000 چرخه حداقل
نمایشگر LED:
NO LED: سبز (فعال در حالت بسته)
NC LED: قرمز (فعال در حالت باز)
نوع: SMD 0805
جریان: 5mA با مقاومت محدودکننده
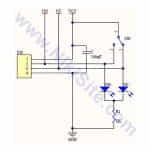
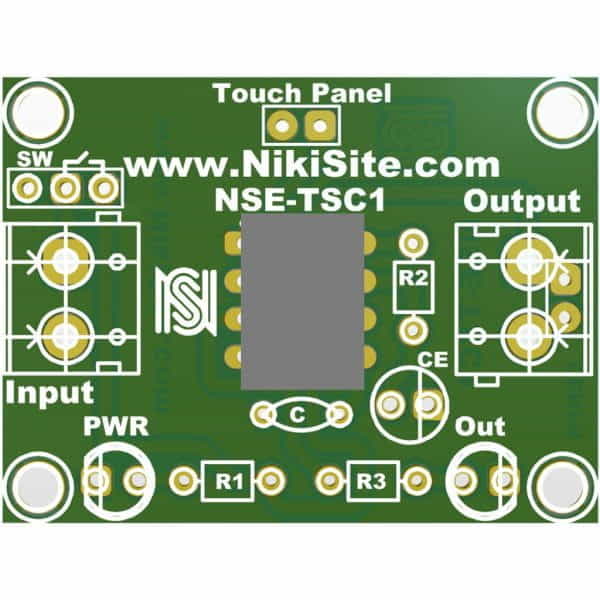
🛠️ طراحی مدار بهینهشده
ساختار داخلی:
پیکربندی مدار V2:
+5V
│
[10KΩ] ← مقاومت پایه
│
میکروسوییچ ← نقطهاشتراک
┌─────┴─────┐
│ │
NO خروجی NC خروجی
│ │
[100nF] [100nF] ← خازنهای فیلتر
│ │
LED سبز LED قرمز
│ │
GND GNDمزایای طراحی V2:
فیلتر نویز: کاهش خطاهای کاذب
نمایشگر بصری: تشخیص سریع وضعیت
جدا بودن خروجیها: امکان استفاده همزمان
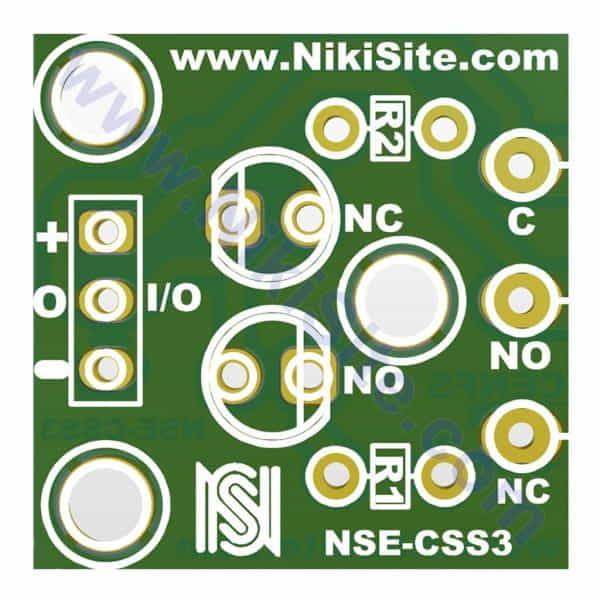
🔌 پیکربندی پایهها
پینهای ماژول:
ماژول از چپ به راست: پین 1: VCC (+5V) پین 2: GND (زمین) پین 3: NO (Normally Open) پین 4: NC (Normally Closed)
جدول وضعیت LED:
| وضعیت سوئیچ | LED سبز (NO) | LED قرمز (NC) | توضیح |
|---|---|---|---|
| باز | خاموش | روشن | حالت عادی، تماسی وجود ندارد |
| بسته | روشن | خاموش | برخورد یا فشار تشخیص داده شد |
💻 اتصال و برنامهنویسی
اتصال پایه به آردوینو:
// تعریف پایههای ماژول V2 #define SENSOR_VCC_PIN // به 5V متصل شود #define SENSOR_GND_PIN // به GND متصل شود #define SENSOR_NO_PIN 2 // خروجی Normally Open #define SENSOR_NC_PIN 3 // خروجی Normally Closed void setupSensorV2() { Serial.begin(9600); // تنظیم پایههای ورودی pinMode(SENSOR_NO_PIN, INPUT); pinMode(SENSOR_NC_PIN, INPUT); Serial.println("ماژول سنسور برخورد V2 راهاندازی شد"); Serial.println("================================"); } void loop() { // خواندن هر دو خروجی bool noState = digitalRead(SENSOR_NO_PIN); bool ncState = digitalRead(SENSOR_NC_PIN); // نمایش وضعیت Serial.print("NO: "); Serial.print(noState ? "بسته" : "باز"); Serial.print(" | NC: "); Serial.print(ncState ? "بسته" : "باز"); // تشخیص وضعیت if (!noState && ncState) { Serial.println(" - وضعیت: عادی (باز)"); } else if (noState && !ncState) { Serial.println(" - وضعیت: فعال (بسته)"); } else { Serial.println(" - خطا: وضعیت نامعتبر"); } delay(200); }
کلاس مدیریت پیشرفته:
class CrashSensorV2 { private: int noPin; int ncPin; bool lastState; unsigned long debounceTime; public: CrashSensorV2(int no, int nc) { noPin = no; ncPin = nc; lastState = false; debounceTime = 0; pinMode(noPin, INPUT); pinMode(ncPin, INPUT); } // خواندن وضعیت با debounce bool readDebounced() { bool noRead = digitalRead(noPin); bool ncRead = digitalRead(ncPin); // وضعیت معتبر: NO و NC باید مخالف هم باشند if (noRead == !ncRead) { unsigned long currentTime = millis(); if (currentTime - debounceTime > 50) { // 50ms debounce bool currentState = noRead; // NO=1 یعنی بسته if (currentState != lastState) { lastState = currentState; debounceTime = currentTime; if (currentState) { Serial.println("🟢 برخورد تشخیص داده شد (سوئیچ بسته)"); } else { Serial.println("🔴 سوئیچ باز شد"); } } return currentState; } } else { Serial.println("⚠️ خطا: وضعیت نامعتبر NO/NC"); } return lastState; } // بررسی سلامت سنسور bool sensorHealthy() { bool noState = digitalRead(noPin); bool ncState = digitalRead(ncPin); // در حالت سالم، NO و NC باید همیشه مخالف هم باشند return (noState != ncState); } // گرفتن وضعیت هر دو خروجی void getBothStates(bool &no, bool &nc) { no = digitalRead(noPin); nc = digitalRead(ncPin); } }; // استفاده از کلاس CrashSensorV2 sensor(2, 3); void setup() { Serial.begin(9600); if (sensor.sensorHealthy()) { Serial.println("سنسور V2 سالم است"); } } void loop() { bool isTriggered = sensor.readDebounced(); if (isTriggered) { // اقدامات لازم هنگام برخورد emergencyProcedure(); } delay(10); }
🔧 نصب و راهاندازی
مرحله ۱: اتصال الکتریکی
اتصال به بردبورد: 1. VCC → ریل 5V 2. GND → ریل زمین 3. NO → به پایه دیجیتال میکروکنترلر 4. NC → به پایه دیگر (اختیاری)
مرحله ۲: تست اولیه
void quickTest() { Serial.println("=== تست سریع سنسور V2 ==="); bool noState, ncState; sensor.getBothStates(noState, ncState); Serial.print("وضعیت NO: "); Serial.println(noState ? "HIGH (بسته)" : "LOW (باز)"); Serial.print("وضعیت NC: "); Serial.println(ncState ? "HIGH (بسته)" : "LOW (باز)"); // تست صحت عملکرد if (noState == !ncState) { Serial.println("✅ سنسور به درستی کار میکند"); } else { Serial.println("❌ خطا در سنسور"); } // تست LED Serial.println("پیش از فشار دادن: LED قرمز روشن"); Serial.println("پس از فشار دادن: LED سبز روشن"); }
مرحله ۳: کالیبراسیون
void calibrateSensor() { Serial.println("کالیبراسیون سنسور برخورد V2"); Serial.println("1. سنسور را در حالت آزاد رها کنید"); delay(3000); bool noState, ncState; sensor.getBothStates(noState, ncState); if (!noState && ncState) { Serial.println("✅ حالت عادی کالیبره شد"); } else { Serial.println("⚠️ حالت عادی تشخیص داده نشد"); } Serial.println("2. سوئیچ را فشار دهید و نگه دارید"); delay(5000); sensor.getBothStates(noState, ncState); if (noState && !ncState) { Serial.println("✅ حالت فعال کالیبره شد"); } else { Serial.println("⚠️ حالت فعال تشخیص داده نشد"); } Serial.println("کالیبراسیون کامل شد"); }
⚙️ کاربردهای عملی
۱. سیستمهای ایمنی ساده:
void safetyMonitor() { static bool lastSafeState = true; bool isSafe = !sensor.readDebounced(); // false = خطر if (isSafe != lastSafeState) { lastSafeState = isSafe; if (isSafe) { Serial.println("✅ منطقه امن"); enableMachine(); } else { Serial.println("🚨 خطر: منطقه محافظت شده!"); disableMachine(); soundAlarm(); } } }
۲. شمارنده رویدادها:
class EventCounter { private: int count; bool lastState; public: EventCounter() : count(0), lastState(false) {} void update(bool currentState) { if (currentState && !lastState) { // لبه بالارونده count++; Serial.print("رویداد شماره: "); Serial.println(count); } lastState = currentState; } int getCount() { return count; } void reset() { count = 0; } }; EventCounter counter; void loop() { bool triggered = sensor.readDebounced(); counter.update(triggered); if (counter.getCount() >= 100) { Serial.println("⚠️ به حد مجاز رویداد رسید"); counter.reset(); } delay(1); }
۳. سیستم ضدگیرکردن:
void antiJamSystem() { static unsigned long triggerStart = 0; bool isTriggered = sensor.readDebounced(); if (isTriggered) { if (triggerStart == 0) { triggerStart = millis(); } else { unsigned long duration = millis() - triggerStart; if (duration > 5000) { // 5 ثانیه گیرکردن Serial.println("🚨 گیرکردن تشخیص داده شد!"); emergencyReverse(); triggerStart = 0; } } } else { triggerStart = 0; } }
🛡️ مزایای خازن فیلتر
حذف نویزهای رایج:
نویز تماس: جرقه هنگام اتصال/قطع
نویز محیطی: القای الکترومغناطیسی
نویز منبع تغذیه: ریپل آداپتور
بهبود پایداری:
// مقایسه با و بدون فیلتر void compareWithWithoutFilter() { // بدون فیلتر (ماژول معمولی) int unstableCount = 0; for (int i = 0; i < 1000; i++) { if (digitalRead(SENSOR_PIN) != digitalRead(SENSOR_PIN)) { unstableCount++; } delayMicroseconds(10); } // با فیلتر (ماژول V2) int stableCount = 0; for (int i = 0; i < 1000; i++) { if (digitalRead(SENSOR_NO_PIN) == digitalRead(SENSOR_NO_PIN)) { stableCount++; } delayMicroseconds(10); } Serial.print("تعداد نوسان بدون فیلتر: "); Serial.println(unstableCount); Serial.print("تعداد نوسان با فیلتر: "); Serial.println(1000 - stableCount); }
🔍 نمایشگر LED هوشمند
کدهای وضعیت:
void interpretLEDPattern() { bool ledGreen = digitalRead(LED_GREEN_PIN); bool ledRed = digitalRead(LED_RED_PIN); Serial.print("نمایشگر LED: "); if (!ledGreen && ledRed) { Serial.println("🟢 آماده (سوئیچ باز)"); } else if (ledGreen && !ledRed) { Serial.println("🔴 فعال (سوئیچ بسته)"); } else if (ledGreen && ledRed) { Serial.println("🟡 خطا: هر دو LED روشن"); } else { Serial.println("⚫ خاموش: برق قطع یا خرابی"); } }
کنترل روشنایی LED:
void controlLEDBrightness(int brightness) { // محدود کردن روشنایی برای افزایش عمر LED brightness = constrain(brightness, 0, 80); // حداکثر 80% // در صورت نیاز میتوان PWM اعمال کرد analogWrite(LED_GREEN_PIN, brightness * 255 / 100); analogWrite(LED_RED_PIN, brightness * 255 / 100); }
⚡ نکات نصب مکانیکی
موقعیتدهی بهینه:
زاویه تماس: اهرم عمود بر سطح تماس باشد
فاصله پیشتماس: 1-2mm قبل از نقطه تماس اصلی
نیروی فعالسازی: تنظیم برای حداقل نیروی مورد نیاز
محل نصب: دور از ارتعاشات و ضربههای مستقیم
پیچهای نصب:
سایز: M3 یا #4-40
گشتاور: 0.3-0.5 Nm
فاصله: مطابق سوراخهای PCB
واشر: استفاده از واشر فنری برای جذب لرزش
🚀 پروژههای نمونه
پروژه ۱: دزدگیر ساده:
class SimpleBurglarAlarm { private: CrashSensorV2* sensor; bool armed; bool triggered; public: SimpleBurglarAlarm(CrashSensorV2* s) : sensor(s), armed(false), triggered(false) {} void arm() { armed = true; triggered = false; Serial.println("دزدگیر فعال شد"); } void disarm() { armed = false; Serial.println("دزدگیر غیرفعال شد"); } void check() { if (armed) { if (sensor->readDebounced()) { if (!triggered) { triggered = true; triggerAlarm(); } } } } void triggerAlarm() { Serial.println("🚨 🚨 🚨 هشدار نفوذ! 🚨 🚨 🚨"); // فعال کردن آژیر // روشن کردن چراغ // ارسال پیام } };
پروژه ۲: کنترل درب اتوماتیک:
void automaticDoorControl() { static enum { OPEN, CLOSING, CLOSED, OPENING } state = CLOSED; static CrashSensorV2 safetySensor(2, 3); // سنسور ایمنی switch (state) { case CLOSING: if (safetySensor.readDebounced()) { Serial.println("مانع تشخیص داده شد! درب باز میشود"); state = OPENING; reverseMotor(); } else if (doorFullyClosed()) { state = CLOSED; stopMotor(); } break; // سایر حالات... } }
🔧 نگهداری و عیبیابی
برنامه نگهداری پیشگیرانه:
void preventiveMaintenance() { Serial.println("=== نگهداری دورهای سنسور V2 ==="); // تست الکتریکی testElectrical(); // تست مکانیکی testMechanical(); // تمیزکاری cleaningProcedure(); // ثبت گزارش logMaintenance(); Serial.println("نگهداری تکمیل شد"); } void testElectrical() { Serial.println("تست الکتریکی:"); // تست اتصال کوتاه if (checkShortCircuit()) { Serial.println("❌ اتصال کوتاه وجود دارد"); } else { Serial.println("✅ بدون اتصال کوتاه"); } // تست مقاومت عایق if (checkInsulation()) { Serial.println("✅ عایقبندی سالم"); } else { Serial.println("❌ مشکل در عایقبندی"); } }
علائم خرابی و راهحل:
| مشکل | علت احتمالی | راهحل |
|---|---|---|
| هر دو LED روشن | اتصال کوتاه داخلی | تعویض ماژول |
| هیچ LED روشن نمیشود | قطعی برق | چک کردن اتصالات |
| LEDها نامناسب تغییر میکنند | نویز محیطی | افزودن شیلد |
| وضعیت NO/NC همزمان | خرابی سوئیچ | تعویض میکروسوییچ |
📦 مشخصات بستهبندی
محتویات استاندارد:
1 عدد ماژول سنسور برخورد V2
1 عدد میکروسوییچ با کیفیت
4 عدد پایه هدر نر (قابل لحیم)
2 عدد خازن 100nF اضافی
برگه راهنمای فشرده
ویژگیهای بستهبندی:
ضد الکتریسیته ساکن: کیسه ESD
ضد رطوبت: سیلندر خشککن
ضد ضربه: فوم محافظ
برچسب: مشخصات کامل محصول
⚠️ ملاحظات ایمنی
حدود کاری:
حداکثر ولتاژ: 12V DC
حداکثر جریان: 100mA (هر خروجی)
حداکثر دما: 85°C محیط
حداقل دما: -25°C محیط
هشدارها:
از اتصال به ولتاژ AC خودداری کنید
در محیطهای انفجاری استفاده نکنید
از تماس با مواد خورنده جلوگیری کنید
دور از دسترس کودکان نگهداری شود
🌟 نتیجهگیری
ماژول سنسور برخورد V2 با طراحی ساده اما موثر، راهحلی ایدهآل برای کاربردهایی است که به قابلیت اطمینان بالا و نگهداری آسان نیاز دارند. وجود هر دو خروجی NO و NC به همراه نمایشگر بصری و فیلتر نویز، آن را به انتخابی منطقی برای پروژههای صنعتی و آموزشی تبدیل میکند.
سادگی در استفاده، قابلیت اطمینان در عملکرد
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) |
|---|
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.




















دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.