









")



")
")
")
")
")
")
")



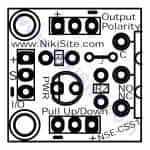







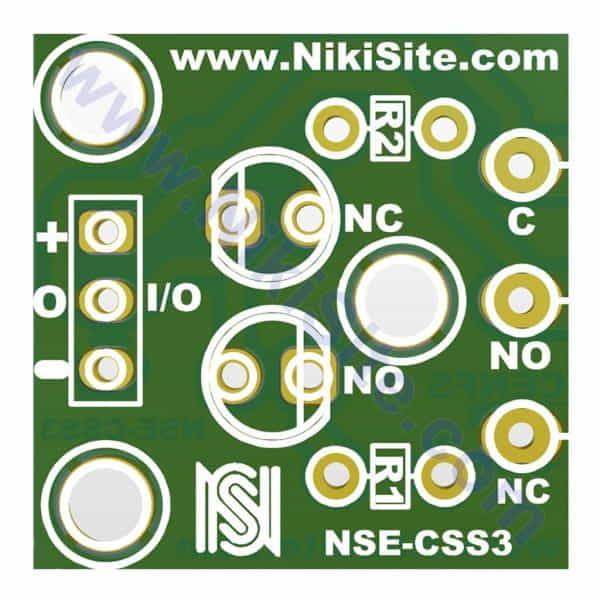
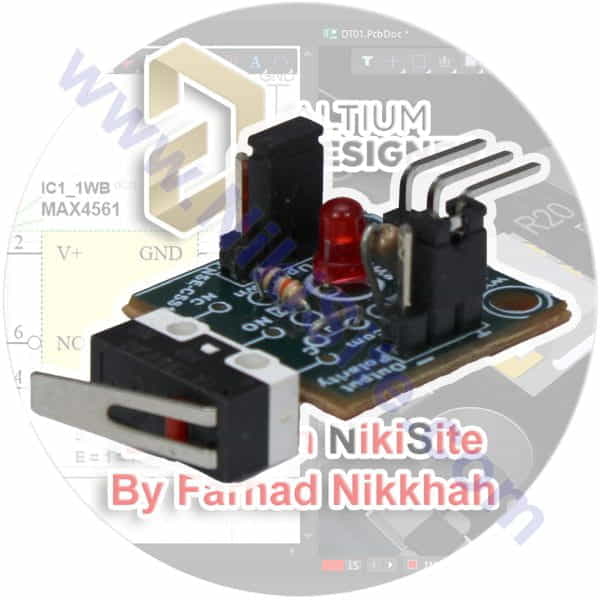
نقشه ماژول سنسور برخورد 1
50,000 تومانهر فایل
Crash Sensor Module V1
این ماژول سنسور برخورد NSE-CSS1
ماژول سنسور برخورد NSE-CSS1 یک راهحل ایدهآل برای تشخیص برخورد و محدودیت حرکت در پروژههای رباتیک، سیستمهای اتوماسیون و دستگاههای CNC است.
با طراحی هوشمندانه و قابلیتهای تنظیمپذیری گسترده، این ماژول تبدیل به چشم امنیتی سیستمهای حرکتی شما میشود.
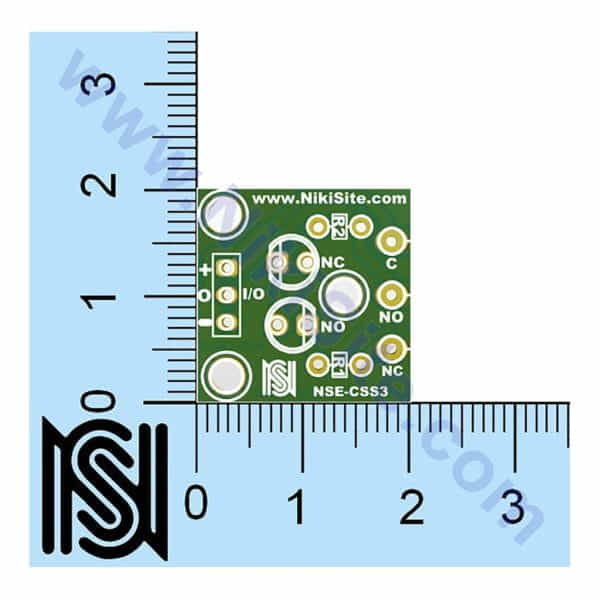
Size and packaging guidelines
| یکا (واحد) | علامت اختصاری | شرح انگلیسی | مقدار |
| 1 متر | m | Meter | 1 |
| 1 سانتی متر | cm | Canti Meter | 2-^10 |
| 1 میلی متر | mm | Mili Meter | 3-^10 |
| 1 اینچ | in | Inch | 2.54cm |
| 2 اینچ | in | Inch | 5.08cm |
| 3 اینچ | in | Inch | 7.62cm |
| 5 اینچ | in | Inch | 12.7cm |
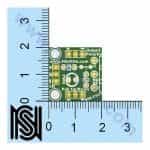
ماژول سنسور برخورد 1
Crash Sensor Module V1
ردیاب امنیتی هوشمند با قابلیتهای پیشرفته
🛡️ سنسور برخورد NSE-CSS1: محافظ مطمئن برای پروژههای مکانیکی
ماژول سنسور برخورد NSE-CSS1 یک راهحل ایدهآل برای تشخیص برخورد و محدودیت حرکت در پروژههای رباتیک، سیستمهای اتوماسیون و دستگاههای CNC است. با طراحی هوشمندانه و قابلیتهای تنظیمپذیری گسترده، این ماژول تبدیل به چشم امنیتی سیستمهای حرکتی شما میشود.
⚡ ویژگیهای اصلی
🎯 عملکرد سوئیچ مکانیکی:
حساسیت بالا: فعال شدن با کمترین فشار فیزیکی
پاسخ سریع: زمان پاسخ کمتر از 10 میلیثانیه
ایزولاسیون حرارتی: عملکرد پایدار در دمای 40- تا 80+ درجه سانتیگراد
🔧 قابلیتهای تنظیمپذیری:
انتخاب تحریک: مثبت یا منفی (Active HIGH/LOW)
تنظیم مقاومت: Pull-Up یا Pull-Down داخلی
نشانگر وضعیت: LED نشانگر اتصال منبع تغذیه
🔌 اتصال ساده:
کابل سه سیمه: VCC، GND، SIGNAL
پایه استاندارد: 2.54mm pitch
ولتاژ کاری گسترده: 3.3V تا 5V
📊 مشخصات فنی دقیق
الکتریکی:
ولتاژ کاری: 3.3V – 5V DC
جریان مصرف: 10mA (ماکزیمم 15mA)
مقاومت داخلی: 10KΩ pull-up/pull-down
ولتاژ خروجی: 0V یا Vcc (بسته به تنظیمات)
ایزولاسیون: 500V AC برای 1 دقیقه
مکانیکی:
نوع سوئیچ: میکروسوییچ با اهرم غلطکی
نیروی فعالسازی: 0.5N – 1.5N
سفر اهرم: 15 درجه ±3°
طول عمر مکانیکی: 1,000,000 چرخه
نوع اهرم: غلطک استیل ضدزنگ
فیزیکی:
ابعاد PCB: 32mm × 24mm
ارتفاع کلی: 18mm (با اهرم)
سوراخ نصب: 3mm (2 عدد)
وزن: 8 گرم
رنگ: آبی با ماسک لحیم
🛠 طراحی هوشمند
مدار داخلی پیشرفته:
پیکربندی مدار:
VCC → مقاومت 10KΩ → جامپر تنظیم → خروجی
↓
میکروسوییچ → GND
↓
LED نشانگرقابلیتهای تنظیم:
J1 (تحریک): انتخاب Active HIGH یا LOW
J2 (مقاومت): انتخاب Pull-Up یا Pull-Down
LED Power: نشانگر وصل بودن تغذیه
مقاومت در برابر محیط:
ضد گرد و غبار: پوشش محافظ روی سوئیچ
مقاوم حرارتی: عملکرد در محدوده وسیع دمایی
ضد لرزش: طراحی شده برای محیطهای صنعتی
🔧 نحوه نصب و راهاندازی
مرحله ۱: تنظیمات اولیه
// تنظیمات پایه ماژول سنسور برخورد #define CRASH_SENSOR_PIN 2 // پایه سیگنال // حالتهای تنظیمات جامپر enum JumperConfig { ACTIVE_HIGH_PULLUP, // تحریک مثبت با مقاومت بالا ACTIVE_HIGH_PULLDOWN, // تحریک مثبت با مقاومت پایین ACTIVE_LOW_PULLUP, // تحریک منفی با مقاومت بالا ACTIVE_LOW_PULLDOWN // تحریگ منفی با مقاومت پایین }; JumperConfig sensorConfig = ACTIVE_HIGH_PULLUP; // حالت پیشفرض
مرحله ۲: اتصال فیزیکی
نصب روی دستگاه: 1. سوراخهای 3mm ماژول را تراز کنید 2. با پیچ M3 محکم کنید (گشتاور 0.4-0.6 Nm) 3. اهرم را در مسیر حرکت قرار دهید 4. کابل 3 سیمه را به کنترلر متصل کنید
مرحله ۳: تنظیم جامپرها
void setupCrashSensor() { // پیکربندی جامپرها بر اساس نیاز /* جامپر J1 (تحریک): - وصل: Active HIGH - قطع: Active LOW جامپر J2 (مقاومت): - وصل: Pull-Up - قطع: Pull-Down */ pinMode(CRASH_SENSOR_PIN, INPUT); Serial.println("سنسور برخورد راهاندازی شد"); Serial.println("========================"); printSensorConfig(); } void printSensorConfig() { Serial.print("حالت فعال: "); Serial.println(digitalRead(JUMPER1_PIN) ? "HIGH" : "LOW"); Serial.print("نوع مقاومت: "); Serial.println(digitalRead(JUMPER2_PIN) ? "Pull-Up" : "Pull-Down"); }
💡 کاربردهای اصلی
۱. رباتیک و اتوماسیون:
class CrashDetectionSystem { private: int sensorPin; bool crashDetected; unsigned long crashTime; public: CrashDetectionSystem(int pin) { sensorPin = pin; crashDetected = false; crashTime = 0; pinMode(sensorPin, INPUT); } void update() { bool sensorState = digitalRead(sensorPin); if (sensorState == HIGH) { // در حالت Active HIGH if (!crashDetected) { crashDetected = true; crashTime = millis(); onCrashDetected(); } } else { crashDetected = false; } } void onCrashDetected() { Serial.println("🚨 برخورد تشخیص داده شد!"); Serial.print("زمان: "); Serial.println(crashTime); // توقف موتورها stopAllMotors(); // فعال کردن آلارم triggerAlarm(); // ارسال گزارش sendCrashReport(); } bool isCrashDetected() { return crashDetected; } unsigned long getCrashDuration() { if (crashDetected) { return millis() - crashTime; } return 0; } };
۲. سیستمهای CNC و پرینتر سهبعدی:
void setupEndStops() { // تنظیم سنسورهای انتهایی هر محور CrashDetectionSystem xMinEndstop(A0); CrashDetectionSystem xMaxEndstop(A1); CrashDetectionSystem yMinEndstop(A2); CrashDetectionSystem yMaxEndstop(A3); CrashDetectionSystem zMinEndstop(A4); CrashDetectionSystem zMaxEndstop(A5); Serial.println("همه End Stops تنظیم شدند"); } void checkAllEndStops() { // بررسی مداوم سنسورهای انتهایی while(true) { if (xMinEndstop.isCrashDetected()) { Serial.println("برخورد به انتهای محور X-"); stopXAxis(); } if (xMaxEndstop.isCrashDetected()) { Serial.println("برخورد به انتهای محور X+"); stopXAxis(); } // بررسی سایر محورها... delay(10); // چک کردن هر 10ms } }
⚙️ پیکربندی جامپرها
جدول تنظیمات:
| جامپر J1 | جامپر J2 | حالت فعال | نوع مقاومت | کاربرد رایج |
|---|---|---|---|---|
| وصل | وصل | HIGH | Pull-Up | آردوینو، رزبریپای |
| وصل | قطع | HIGH | Pull-Down | PLC، مدارات صنعتی |
| قطع | وصل | LOW | Pull-Up | سیستمهای معکوس |
| قطع | قطع | LOW | Pull-Down | کاربردهای خاص |
نحوه تنظیم:
void configureForArduino() { // تنظیم برای آردوینو (پیشفرض) // J1: وصل (Active HIGH) // J2: وصل (Pull-Up) Serial.println("پیکربندی برای آردوینو:"); Serial.println("- تحریک مثبت (Active HIGH)"); Serial.println("- مقاومت Pull-Up داخلی"); } void configureForIndustrialPLC() { // تنظیم برای PLC صنعتی // J1: وصل (Active HIGH) // J2: قطع (Pull-Down) Serial.println("پیکربندی برای PLC:"); Serial.println("- تحریک مثبت (Active HIGH)"); Serial.println("- مقاومت Pull-Down خارجی"); }
🔌 اتصال به میکروکنترلرها
آردوینو Uno:
// اتصال ساده به آردوینو #define CRASH_SENSOR_PIN 2 // پین دیجیتال با وقفه void setup() { Serial.begin(9600); // استفاده از وقفه برای پاسخ سریع attachInterrupt(digitalPinToInterrupt(CRASH_SENSOR_PIN), crashDetectedISR, RISING); Serial.println("سنسور برخورد با وقفه فعال شد"); } void crashDetectedISR() { // این تابع با هر برخورد فراخوانی میشود emergencyStop(); }
رزبریپای:
# کد پایتون برای رزبریپای import RPi.GPIO as GPIO import time CRASH_SENSOR_PIN = 17 def setup(): GPIO.setmode(GPIO.BCM) GPIO.setup(CRASH_SENSOR_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) def crash_callback(channel): print("برخورد تشخیص داده شد!") # اقدامات اضطراری def main(): setup() GPIO.add_event_detect(CRASH_SENSOR_PIN, GPIO.FALLING, callback=crash_callback, bouncetime=200) try: while True: time.sleep(1) except KeyboardInterrupt: GPIO.cleanup()
🏗️ نصب مکانیکی
نحوه نصب صحیح:
موقعیتیابی: سنسور را در مسیر حرکت قرار دهید
تراز کردن: اهرم باید عمود بر مسیر حرکت باشد
فاصله مناسب: 2-3mm از نقطه برخورد فاصله داشته باشد
محکم کردن: با دو پیچ M3 کاملاً ثابت شود
نکات نصب:
از لرزشگیر برای محیطهای ارتعاشی استفاده کنید
کابل را با بست محافظت کنید
از خم شدن شدید کابل جلوگیری کنید
🚨 سیستمهای امنیتی
کلاس مدیریت چند سنسوره:
class MultiCrashSensorSystem { private: struct Sensor { int pin; String name; bool triggered; unsigned long triggerTime; }; Sensor sensors[8]; int sensorCount; public: MultiCrashSensorSystem() { sensorCount = 0; } void addSensor(int pin, String name) { if (sensorCount < 8) { sensors[sensorCount].pin = pin; sensors[sensorCount].name = name; sensors[sensorCount].triggered = false; pinMode(pin, INPUT); sensorCount++; } } void checkAllSensors() { for (int i = 0; i < sensorCount; i++) { bool currentState = digitalRead(sensors[i].pin); if (currentState == HIGH && !sensors[i].triggered) { sensors[i].triggered = true; sensors[i].triggerTime = millis(); logCrashEvent(sensors[i].name); } else if (currentState == LOW) { sensors[i].triggered = false; } } } void logCrashEvent(String sensorName) { Serial.print("🚨 برخورد در سنسور: "); Serial.println(sensorName); Serial.print("زمان: "); Serial.println(millis()); // ذخیره در حافظه // ارسال به سرور // فعال کردن آلارم } };
📈 کاربردهای صنعتی
۱. سیستمهای نوار نقاله:
تشخیص انسداد مواد
محافظت از موتورها
جلوگیری از پرتاب مواد
۲. ماشینآلات CNC:
End Stop محورها
تشخیص برخورد ابزار
محافظت از اسپیندل
۳. دربهای اتوماتیک:
تشخیص مانع
جلوگیری از بسته شدن روی افراد
محافظت از موتور درب
۴. رباتهای صنعتی:
محدودیت حرکت بازوها
تشخیص برخورد با محیط
ایمنی اپراتورها
🔧 عیبیابی و نگهداری
مشکلات رایج:
عدم پاسخ: جامپرها را بررسی کنید
نوسان سیگنال: کابل را از نویز دور کنید
فعال شدن بیدلیل: فاصله سنسور را تنظیم کنید
برنامه نگهداری:
ماهانه: تمیز کردن اهرم و سوئیچ
سهماهه: چک کردن پیچهای نصب
ششماهه: تست عملکرد کامل
سالانه: تعویض در صورت نیاز
برنامه تست:
void diagnosticTest() { Serial.println("=== تست تشخیصی سنسور برخورد ==="); // تست LED تغذیه Serial.print("LED تغذیه: "); Serial.println(checkPowerLED() ? "✅ روشن" : "❌ خاموش"); // تست جامپرها Serial.print("جامپر J1: "); Serial.println(checkJumper1() ? "✅ وصل" : "❌ قطع"); Serial.print("جامپر J2: "); Serial.println(checkJumper2() ? "✅ وصل" : "❌ قطع"); // تست عملکرد سوئیچ Serial.println("لطفاً اهرم را فشار دهید..."); testSwitchOperation(); Serial.println("=== پایان تست ==="); }
🎯 مزایای رقابتی
در مقایسه با سنسورهای نوری:
عدم حساسیت به نور محیط
قابلیت اطمینان بالا
قیمت مقرونبهصرفه
نصب و تنظیم آسان
در مقایسه با سنسورهای خازنی:
عدم حساسیت به مواد غیرفلزی
دقت مکانیکی بالا
مصرف برق کمتر
پاسخ سریعتر
⚠️ نکات ایمنی
قبل از نصب:
برق سیستم را قطع کنید
از تطابق ولتاژ اطمینان حاصل کنید
کابلها را از مسیرهای متحرک دور کنید
در حین کار:
به طور دورهی عملکرد را چک کنید
از فشار بیش از حد به اهرم جلوگیری کنید
در صورت خرابی بلافاصله تعویض کنید
برای محیطهای خاص:
مرطوب: از درجه حفاظت بالاتر استفاده کنید
پرگردوغبار: پوشش اضافی نصب کنید
دمای بالا: مدل مخصوص سفارش دهید
🌟 گارانتی و پشتیبانی
این محصول با گارانتی 18 ماهه و پشتیبانی فنی مادامالعمر ارائه میشود. خدمات ما شامل:
پشتیبانی فنی:
مشاوره رایگان برای انتخاب پیکربندی مناسب
راهنمایی نصب و تنظیم
ارائه کدهای نمونه برای کاربردهای خاص
خدمات اضافی:
امکان سفارشیسازی برای نیازهای خاص
ارائه مستندات فنی کامل
آموزش رایگان برای تیمهای فنی
| ساختار محصول تعیین نوع محصول فیزیکی و مجازی ( شامل نقشه ی شماتیک، مدار چاپی و .. بصورت دانلودی ) |
|---|
.فقط مشتریانی که این محصول را خریداری کرده اند و وارد سیستم شده اند میتوانند برای این محصول دیدگاه ارسال کنند.
























دیدگاهها
پاککردن فیلترهاهیچ دیدگاهی برای این محصول نوشته نشده است.